双目相机原理¶
立体成像概述¶
我们对双眼的立体成像能力非常熟悉,但是在计算机软件中,我们可以模仿这种能力到什么程度呢?实际上,计算机是通过寻找两个成像仪上的对应点来完成这个任务。其原理是:查找某个点在两张图片的对应点,通过其和摄像机基线之间的距离进行计算,可以得到这个点的三维位置。尽管两张图片的对应点的搜索计算量比较高,但我们可以利用几何知识,限定搜索的范围,降低计算量。因此,使用双目相机进行立体成像包括以下4个步骤:
- 去畸变:使用数学方法消除径向和切向的畸变
- 机位标定:调整两个相机的角度和其之间的距离,保证两个相机输出的是帧行对齐的图像,尽可能保证两个图像是共面的。
-
匹配:在左右相机图像中找到相同的特征,此步骤可以输出视差图,视差是指左右摄像机观察得到的相同特征在x方向上的差值: x_l - x_r
-
重投影:如果相机的位置关系已知,则可以通过三角测量法将视差图像转换成距离,这一步骤称之为重投影,输出为一个深度图
三角测量模型¶
假如我们有一个这样的理想装置:一个完美的无畸变、已对准、已测量好的系统,两个摄像机的图像平面彼此完全共面,具有完全平行的光轴(从投影中心O发出,通过主点c的一条射线),他们之间的距离是已知的T,并且具有相等的焦距:f_l=f_r,且假设主点 c^{left}_x , c^{right}_x 已经被校准为在其各自的图像中具有相同的像素坐标。
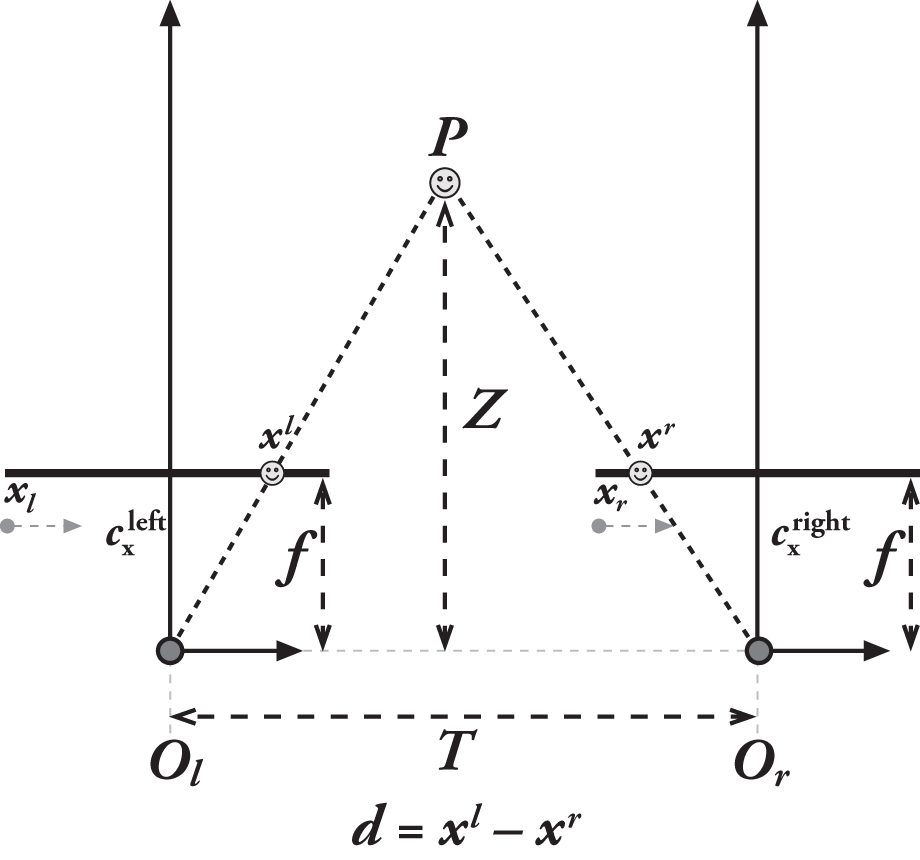
假设我们在物理世界中找到一个点P,在左右图像上的成像点为p_l和p_r,对应的横坐标为x_l和x_r,在此种简化的情况下,我们可以发现深度Z和视差 x_l - x_r 成反比。即越近的图像,视差越大。
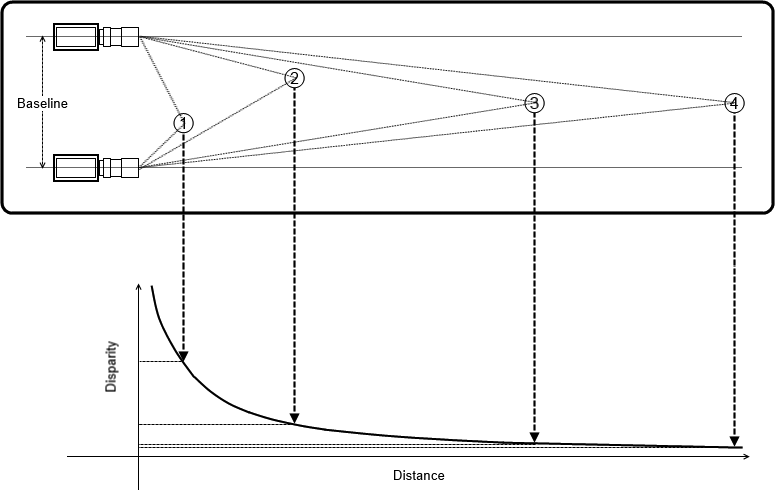
由于深度与视差成反比,且显然,其之间存在非线性的关系,当视差趋近于零时,微小的视差变换会造成很大的深度变换。且当视差较大时,微小的视差变化不会对深度有太大的改变。则可得出以下结论:双目立体视觉系统只有在物体和摄像机距离较近时,才有比较高的深度分辨率。如下图所示:
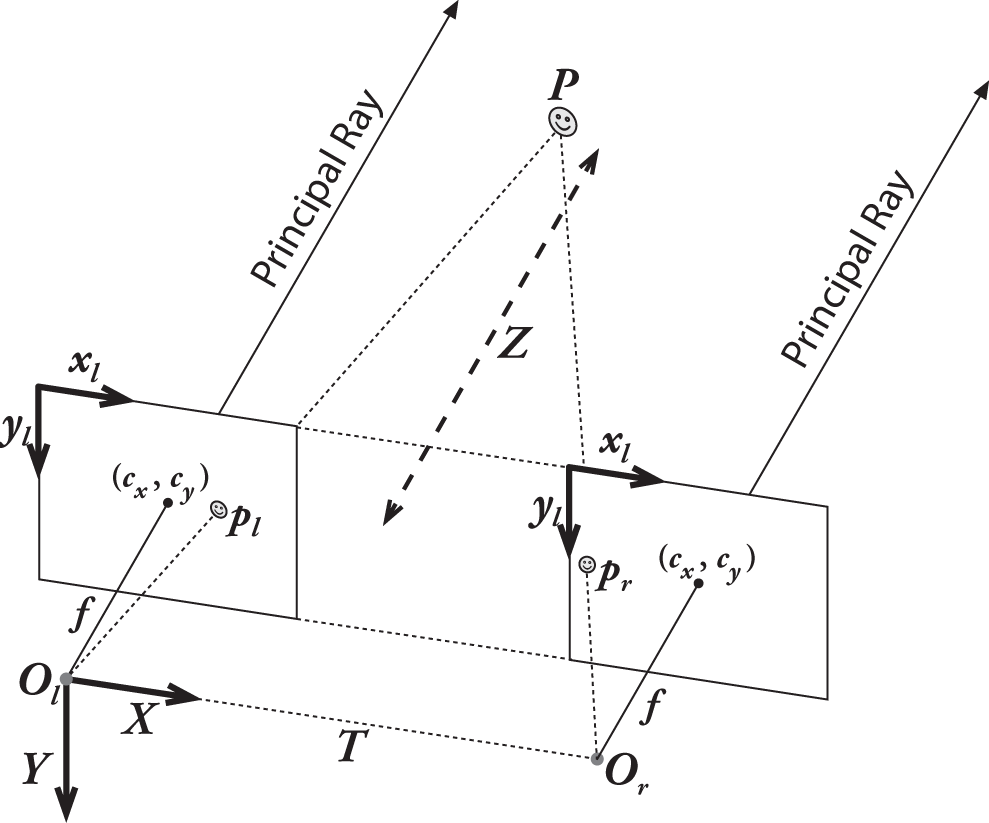
- 下图为OpenCV立体视觉坐标系
用于已进行去畸变的相机,图像左上角为像素坐标系原点,两个图像平面的行与行对齐,整个双目摄像机的坐标系以左目相机的投影中心为原点,采用右手坐标系法则。