rviz可视化操作
起止点设置¶
起止点说明¶
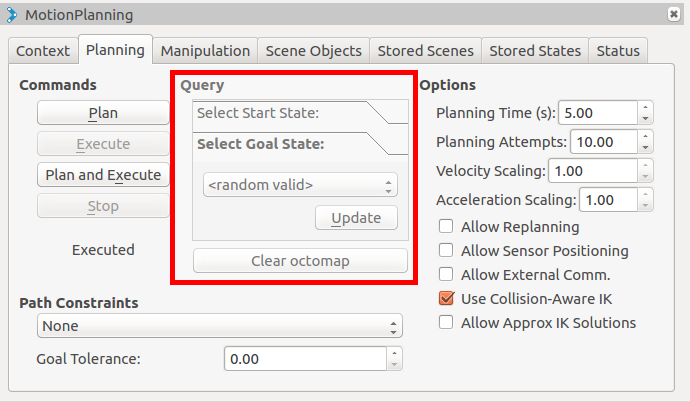
在Planning选项卡中,Query部分的Select Goal State,是用来设置末端 结束位置姿态 的。
Query部分的Select Start State,是用来设置末端 开始位置姿态 的,他们的选项相同。
其中的可选项有:
<random valid>: 随机的位置,但是经过校验,不会产生碰撞<random>: 随机的位置,未经过校验,会产生碰撞<current>: 当前位置<same as start>: 和初始位置一致- home: ur机械臂自定义的姿态
- up: ur机械臂自定义的姿态
Tip
home和up不是所有品牌的机械臂都有的,这个是自定义,是通过sdrf进行配置的。
图形查看¶
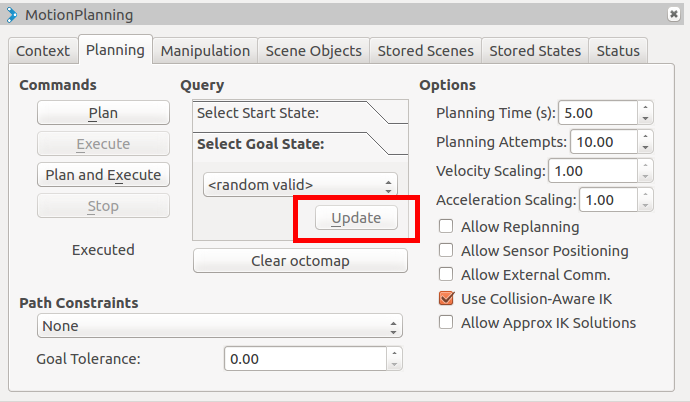
选择完成目标位置后,可以点击update按钮,在可视化区查看目标为:

可视化区中, 橙色部分 就是 目标位置 。
如果你的可视化区没有任何显示,我们可以到Displays面板下的MotionPlanning中的Planning Request里面的Query Goal State,进行勾选。
同时我们也可以选择起始位置,同样可以点击update按钮,在可视化区查看起始状态:
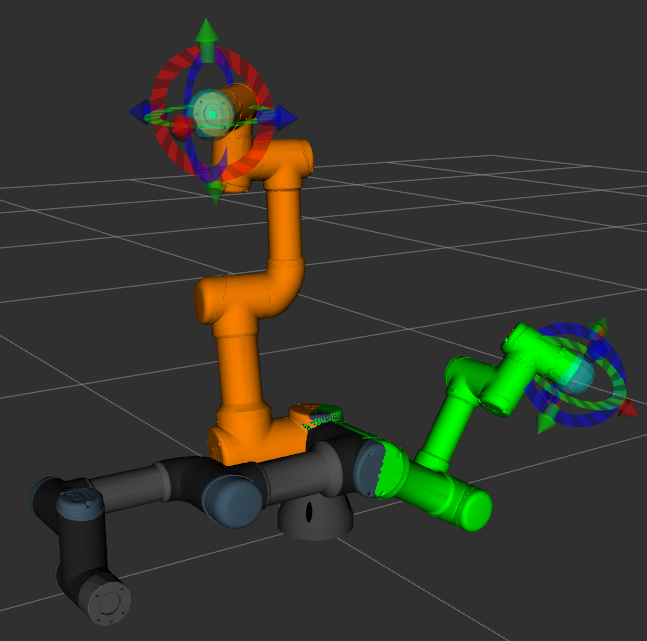
可视化区中,绿色部分 就是 起始位置。
规划执行¶
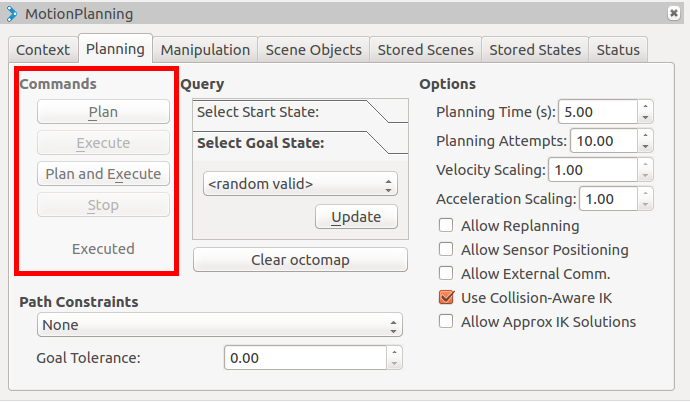
Plan按钮来显示规划的路线。
Execute按钮是来执行移动的。
Plan and Execute按钮 规划执行移动。
Stop按钮,在移动过程中,停止移动。
Plan规划查看¶
点击Plan按钮,我们可以看到,机械臂会从绿色部分移动到橙色部分。
我们也可查看静态的运动轨迹:
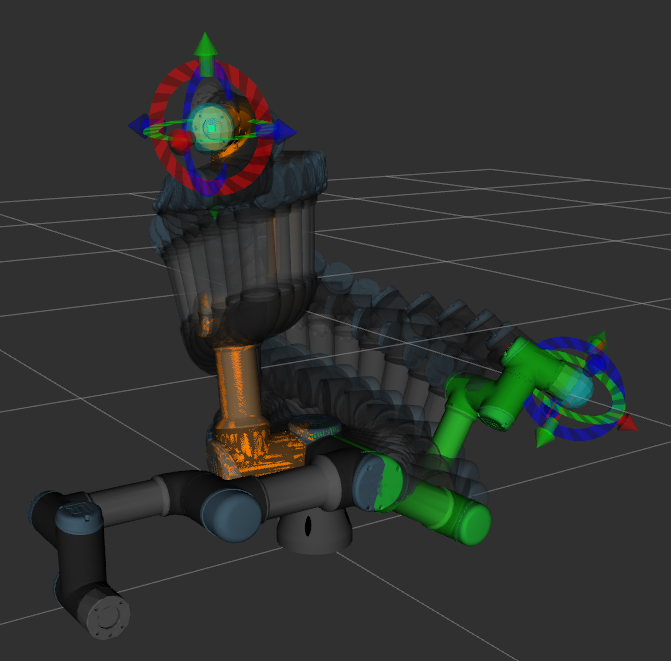
如果查看这个运动轨迹虚影,可以到Displays >> MontionPlanning >> Planned Path >> Show Trail,进行勾选。
执行与停止¶
在Plan完成后,我们可以点击Execute或者是Plan and Execute,就会按照预设的路径进行运动。
在未执行完成时,我们可以通过stop按钮进行停止控制。