Action响应结果(C++)
Action状态变化
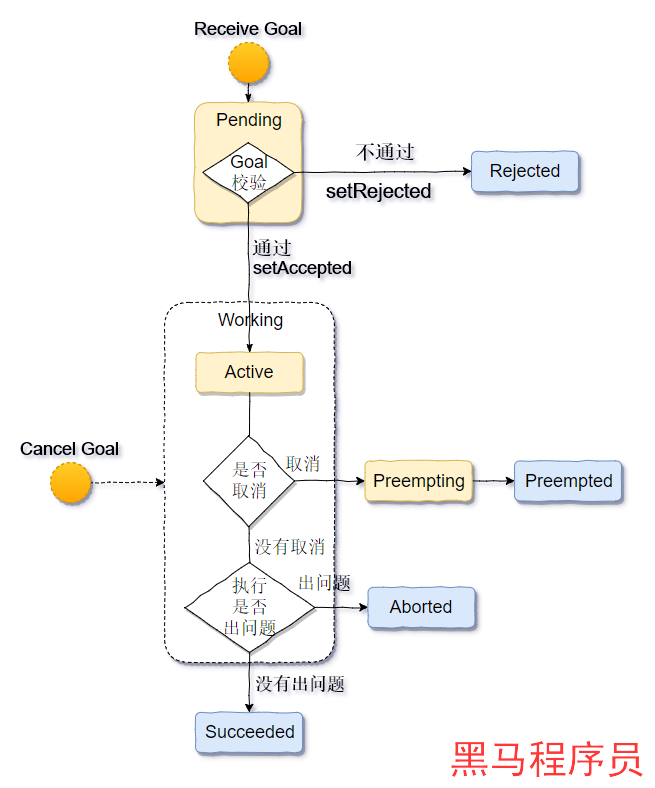
Action通讯的状态按照执行流程分为以上几种。在这几种状态中,有做了一下细分,如下图:
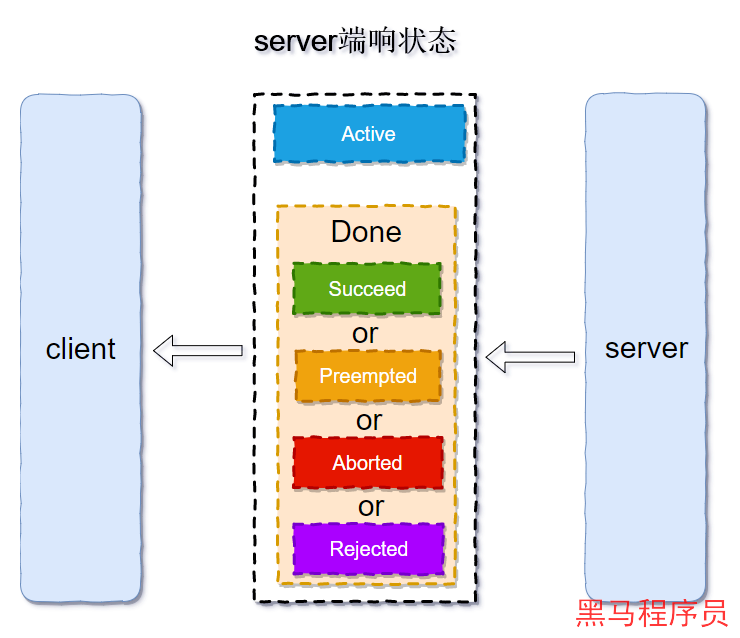
server端在处理状态的过程种,会将所有的状态拆分为常用的两种:Active,Done。
Active和Done状态的分流处理
1
2
3
4
5
6
7
8
9
10
11
12
13 | void transition_cb(ClientGoalHandle goalHandle) {
const actionlib::CommState &state = goalHandle.getCommState();
if (state == actionlib::CommState::ACTIVE) {
ROS_INFO_STREAM("ACTIVE");
} else if (state == actionlib::CommState::DONE) {
ROS_INFO_STREAM("DONE");
actionlib::TerminalState terminalState = goalHandle.getTerminalState();
demo_actions::CountNumberResultConstPtr result = goalHandle.getResult();
done_cb(terminalState, result);
} else {
ROS_INFO_STREAM(state.toString());
}
}
|
Tip
server端状态反馈结果都会回调到client端的transition_cb回调中来。通常我们通过以上代码进行状态的判断和分流。
以上第2行中,我们可以通过goalHanle获得状态CommState,CommState可以有效的进行分流判断。
以上第7行中,我们可以通过goalHanle获得状态TerminalState,TerminalState就是Done的四种状态之一。
以上第8行中,我们可以通过goalHanle获得server端处理的结果,根据实际情况,我们可以定义函数done_cb来处理结果。
在Done状态中,done_cb可以继续的进行状态的判断分流,结果如下:
1
2
3
4
5
6
7
8
9
10
11
12 | void done_cb(actionlib::TerminalState &state, ResultConstPtr &result) {
if (state == state.ABORTED) {
ROS_INFO("server working error, don't finish my job.");
} else if (state == state.PREEMPTED) {
ROS_INFO("client cancel job.");
} else if (state == state.SUCCEEDED) {
ROS_INFO("server finish job.");
ROS_INFO_STREAM("result: " << result->count);
} else if(state == state.REJECTED) {
ROS_INFO("server rejected job.");
}
}
|
Tip
以上就可以进行多种状态分流,进行自己的业务逻辑了。
Succeed结果反馈实现
Succeed状态说由 server端 反馈给 client端 的,因此我们只需要保证server端正常运行即可。
server端代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27 | void goal_cb(ServerGoalHandle &goalHandle){
auto goal = goalHandle.getGoal();
ROS_INFO_STREAM("max: " << goal->max);
ROS_INFO_STREAM("duration: " << goal->duration);
//改变状态为Active
goalHandle.setAccepted();
//进度操作
ros::Rate rate(1.0 / goal->duration);
int count = 0;
while (count < goal->max) {
// 处理进度,反馈进度
demo_actions::CountNumberFeedback feedback;
feedback.percent = count * 100.0 / goal->max;
goalHandle.publishFeedback(feedback);
rate.sleep();
count++;
}
// 响应结果
demo_actions::CountNumberResult result;
result.count = count;
ROS_INFO("Succeeded");
goalHandle.setSucceeded(result, "text Succeeded");
}
|
Tip
goalHandle可以获得goal数据,这个是客户端传递的goal指令数据。
在执行过程种,默认的状态还是PENDING,我们需要通过goalHandle.setAccepted();将状态切换为ACTIVE。
Preempted结果反馈实现
Preempted状态说由server端反馈给client端的,但是前提是client端发出了取消的指令。
client端发送取消指令操作代码如下:
server端处理取消判断的逻辑,通常我们会定义一个map<string,bool>,在cancel_cb取消回调中去记录取消的goal,代码如下:
| void cancel_cb(const ServerGoalHandle goalHandle) {
ROS_INFO("cancel_cb");
auto goalId = goalHandle.getGoalID().id;
cancel_ids[goalId] = true;
}
|
Tip
goalHandle可以获得goal的唯一标识id。
如果取消就记录下来。
在执行逻辑的回调代码中,我们做如下的处理:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42 | void goal_cb(ServerGoalHandle &goalHandle){
auto goal = goalHandle.getGoal();
auto goalId = goalHandle.getGoalID().id;
//标记goalId没有被取消
cancel_ids[goalId] = false;
ROS_INFO_STREAM("max: " << goal->max);
ROS_INFO_STREAM("duration: " << goal->duration);
goalHandle.setAccepted();
//进度操作
ros::Rate rate(1.0 / goal->duration);
int count = 0;
bool isPreempt = false;
while (count < goal->max) {
if (cancel_ids[goalId]) {
isPreempt = true;
break;
}
// 处理进度,反馈进度
demo_actions::CountNumberFeedback feedback;
feedback.percent = count * 100.0 / goal->max;
goalHandle.publishFeedback(feedback);
rate.sleep();
count++;
}
// 响应结果
demo_actions::CountNumberResult result;
result.count = count;
if (isPreempt) {
ROS_INFO("Preempted");
goalHandle.setCanceled(result, "text Preempted");
} else {
ROS_INFO("Succeeded");
goalHandle.setSucceeded(result, "text Succeeded");
}
//移除取消的记录
cancel_ids.erase(goalId);
}
|
Tip
以上高亮代码块中,第一部分和最后一部分,用来记录和删除当前goal是否已经被取消了.
第二部分用来判断是否被取消了,取消了,就走第三部分的高亮逻辑。
Aborted结果响应
Aborted状态说由server端反馈给client端的,但是前提是server端因为自身业务逻辑或者是出现了不可完成的异常导致的结果。server端代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49 | void goal_cb(ServerGoalHandle &goalHandle){
auto goal = goalHandle.getGoal();
auto goalId = goalHandle.getGoalID().id;
//标记goalId没有被取消
cancel_ids[goalId] = false;
ROS_INFO_STREAM("max: " << goal->max);
ROS_INFO_STREAM("duration: " << goal->duration);
goalHandle.setAccepted();
//进度操作
ros::Rate rate(1.0 / goal->duration);
int count = 0;
bool isPreempt = false;
bool isAbort = false;
while (count < goal->max) {
if (cancel_ids[goalId]) {
isPreempt = true;
break;
}
if (count > 10) {
isAbort = true;
break;
}
// 处理进度,反馈进度
demo_actions::CountNumberFeedback feedback;
feedback.percent = count * 100.0 / goal->max;
goalHandle.publishFeedback(feedback);
rate.sleep();
count++;
}
// 响应结果
demo_actions::CountNumberResult result;
result.count = count;
if (isPreempt) {
ROS_INFO("Preempted");
goalHandle.setCanceled(result, "text Preempted");
} else if (isAbort) {
ROS_INFO("Aborted");
goalHandle.setAborted(result, "text Aborted");
} else {
ROS_INFO("Succeeded");
goalHandle.setSucceeded(result, "text Succeeded");
}
cancel_ids.erase(goalId);
}
|
Tip
代码高亮第一部分,我们模拟server端处理过程中,无法完成任务而退出。
第二部分则是如何将状态响应给client端。
Rejected结果反馈实现
Rejected状态说由server端反馈给client端的,但是前提是server端因为client端发送的goal数据不符合自身要求,拒绝了client请求的结果。server端代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54 | void goal_cb(ServerGoalHandle &goalHandle){
auto goal = goalHandle.getGoal();
auto goalId = goalHandle.getGoalID().id;
//标记goalId没有被取消
cancel_ids[goalId] = false;
ROS_INFO_STREAM("max: " << goal->max);
ROS_INFO_STREAM("duration: " << goal->duration);
if (goal->max < 0) {
goalHandle.setRejected();
return;
}
goalHandle.setAccepted();
//进度操作
ros::Rate rate(1.0 / goal->duration);
int count = 0;
bool isPreempt = false;
bool isAbort = false;
while (count < goal->max) {
if (cancel_ids[goalId]) {
isPreempt = true;
break;
}
if (count > 10) {
isAbort = true;
break;
}
// 处理进度,反馈进度
demo_actions::CountNumberFeedback feedback;
feedback.percent = count * 100.0 / goal->max;
goalHandle.publishFeedback(feedback);
rate.sleep();
count++;
}
// 响应结果
demo_actions::CountNumberResult result;
result.count = count;
if (isPreempt) {
ROS_INFO("Preempted");
goalHandle.setCanceled(result, "text Preempted");
} else if (isAbort) {
ROS_INFO("Aborted");
goalHandle.setAborted(result, "text Aborted");
} else {
ROS_INFO("Succeeded");
goalHandle.setSucceeded(result, "text Succeeded");
}
cancel_ids.erase(goalId);
}
|
Tip
代码高亮块部分,是在PENDING状态改变为ACTIVE状态前,先去校验client传入的goal数据是否符合自己处理的逻辑。
并发处理
通过多线程来处理并发。
server端的处理
在goal_cb的回调种,我们可以将所有逻辑放到子线程种去执行。
| void goal_cb(ServerGoalHandle goalHandle) {
new thread(execute_callback, goalHandle);
}
|
client端处理
在启动ros节点时,通过AsyncSpinner来进行线程的阻塞处理。
| ros::AsyncSpinner spinner(4);
spinner.start();
|