SimpleAction响应结果(Python)
响应的结果状态
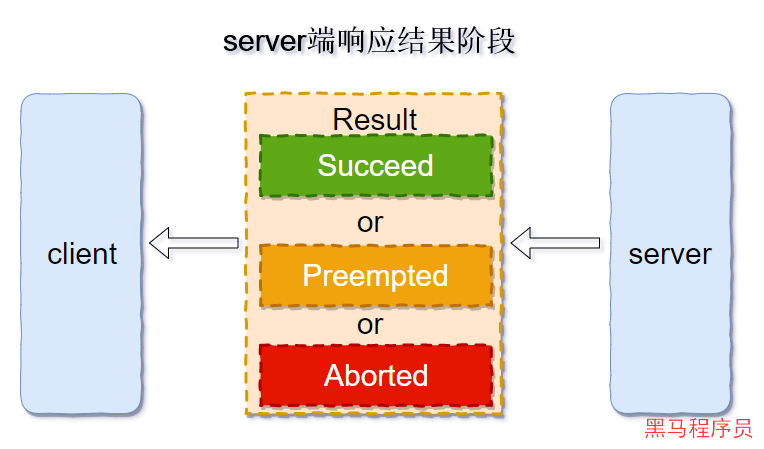
server端在处理完成client的需求时,分为三种状态给client进行答复:
- Succeed:server端成功完成client的需求,将成功结果返回。
- Preempted:server端在在执行过程中,client端取消了执行指令,server端将取消的结果返回。
- Aborted:server端在执行过程中,自身出现了状况,没有完成任务,将结果反馈给client端。
Succeed结果反馈实现
Succeed状态说由 server端 反馈给 client端 的,因此我们只需要保证server端正常运行即可。
server端代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22 | void execute_callback(const demo_actions::CountNumberGoalConstPtr &goal,
actionlib::SimpleActionServer<demo_actions::CountNumberAction> *server) {
ROS_INFO_STREAM("max: " << goal->max);
ROS_INFO_STREAM("duration: " << goal->duration);
//进度操作
ros::Rate rate(1.0 / goal->duration);
int count = 0;
while (count < goal->max) {
// 处理进度,反馈进度
demo_actions::CountNumberFeedback feedback;
feedback.percent = count * 100.0 / goal->max;
server->publishFeedback(feedback);
rate.sleep();
count++;
}
// 响应结果
demo_actions::CountNumberResult result;
result.count = count;
server->setSucceeded(result);
}
|
Preempted结果反馈实现
Preempted状态说由 server端 反馈给 client端 的,但是前提是 client端 发出了 取消的指令 。
client端实现
client端发送取消指令操作代码如下:
server端实现
server端处理取消判断代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31 | void execute_callback(const demo_actions::CountNumberGoalConstPtr &goal,
actionlib::SimpleActionServer<demo_actions::CountNumberAction> *server) {
ROS_INFO_STREAM("max: " << goal->max);
ROS_INFO_STREAM("duration: " << goal->duration);
//进度操作
ros::Rate rate(1.0 / goal->duration);
int count = 0;
bool isPreempt = false;
while (count < goal->max) {
if (server->isPreemptRequested()) {
isPreempt = true;
break;
}
// 处理进度,反馈进度
demo_actions::CountNumberFeedback feedback;
feedback.percent = count * 100.0 / goal->max;
server->publishFeedback(feedback);
rate.sleep();
count++;
}
// 响应结果
demo_actions::CountNumberResult result;
result.count = count;
if (isPreempt) {
server->setPreempted(result);
} else {
server->setSucceeded(result);
}
}
|
Aborted结果响应
Aborted状态说由server端反馈给client端的,但是前提是server端因为自身业务逻辑或者是出现了不可完成的异常导致的结果。server端代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41 | void execute_callback(const demo_actions::CountNumberGoalConstPtr &goal,
actionlib::SimpleActionServer<demo_actions::CountNumberAction> *server) {
ROS_INFO_STREAM("max: " << goal->max);
ROS_INFO_STREAM("duration: " << goal->duration);
//进度操作
ros::Rate rate(1.0 / goal->duration);
int count = 0;
bool isPreempt = false;
bool isAbort = false;
while (count < goal->max) {
if (server->isPreemptRequested()) {
isPreempt = true;
break;
}
if (count > 10) {
isAbort = true;
break;
}
// 处理进度,反馈进度
demo_actions::CountNumberFeedback feedback;
feedback.percent = count * 100.0 / goal->max;
server->publishFeedback(feedback);
rate.sleep();
count++;
}
// 响应结果
demo_actions::CountNumberResult result;
result.count = count;
if (isPreempt) {
ROS_INFO("Preempted");
server->setPreempted(result, "text Preempted");
} else if (isAbort) {
ROS_INFO("Aborted");
server->setAborted(result, "text Aborted");
} else {
ROS_INFO("Succeeded");
server->setSucceeded(result, "text Succeeded");
}
}
|