SimpleActionServer端(Python)
SimpleActionServer端创建流程
1. 初始化ROS,创建节点
| rospy.init_node(nodeName)
|
2. 创建Action的Server端
| server = actionlib.SimpleActionServer(actionName, CountNumberAction, execute_cb=callback, auto_start=False)
server.start()
|
Tip
我们需要引入actionlib这个依赖库,添加头文件依赖
import actionlib
actionlib.SimpleActionServer: Action的Server端对应的类。
第一个参数:当前action的名称
第二个参数:接收的Action消息类型
第三个参数:是client端访问server端的回调
第四个参数:是否自动开启server
3. Server端的业务逻辑
server端的业务逻辑,主要是用于处理client请求的回调。用于结果反馈和过程反馈,提供简单示例:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19 | def callback(goal):
rospy.loginfo(goal)
# 获得请求数据
max = goal.max
duration = goal.duration
rate = rospy.Rate(1.0 / duration)
count = 0
while not rospy.is_shutdown() and count < max:
feedback = CountNumberFeedback()
feedback.percent = count * 100.0 / max
server.publish_feedback(feedback)
rate.sleep()
count += 1
# 发送结果
result = CountNumberResult(count=count)
server.set_succeeded(result)
|
完整代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44 | #!/usr/bin/env python
# coding:utf-8
import rospy
import actionlib
from actionlib import GoalStatus
from demo_actions.msg import CountNumberAction, CountNumberResult, CountNumberFeedback
server = None
def callback(goal):
rospy.loginfo(goal)
# 获得请求数据
max = goal.max
duration = goal.duration
rate = rospy.Rate(1.0 / duration)
count = 0
while not rospy.is_shutdown() and count < max:
feedback = CountNumberFeedback()
feedback.percent = count * 100.0 / max
server.publish_feedback(feedback)
rate.sleep()
count += 1
# 发送结果
result = CountNumberResult(count=count)
server.set_succeeded(result)
if __name__ == '__main__':
nodeName = "CountNumberServer"
actionName = "/count_number"
# 创建节点
rospy.init_node(nodeName)
# 创建Action的服务端
server = actionlib.SimpleActionServer(actionName, CountNumberAction, execute_cb=callback, auto_start=False)
server.start()
# 开启轮询器阻塞线程
rospy.spin()
|
调试Server端
调试server端主要是查看server端是否能接收到请求,并根据请求数据处理相应的业务逻辑,然后返回处理好的结果。
在这里,我们只需要模拟client端发送请求就可以了。
在这里,我们需要模拟以下情况:
- client端发送Goal
- client端接收到的Feedback反馈
- client端接收到的Result反馈
ROS提供了命令行工具和图形化工具供我们调试开发。
1. 通过ros命令进行调试
client端接收到的Feedback反馈
| rosttopic echo /count_number/feedback
|
client端接收到的Result反馈
| rostopic echo /count_number/result
|
client端发送Goal
1
2
3
4
5
6
7
8
9
10
11
12
13
14 | rostopic pub /count_number/goal demo_actions/CountNumberActionGoal "header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
goal_id:
stamp:
secs: 0
nsecs: 0
id: ''
goal:
max: 1000
duration: 0.1"
|
2. 通过rqt工具进行调试
client端接收到的Feedback反馈
| rosrun rqt_topic rqt_topic
|

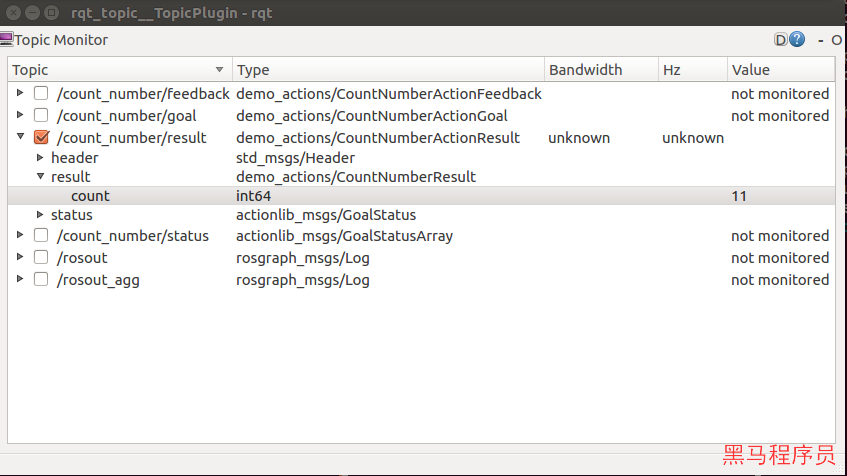
client端接收到的Result反馈
| rosrun rqt_topic rqt_topic
|
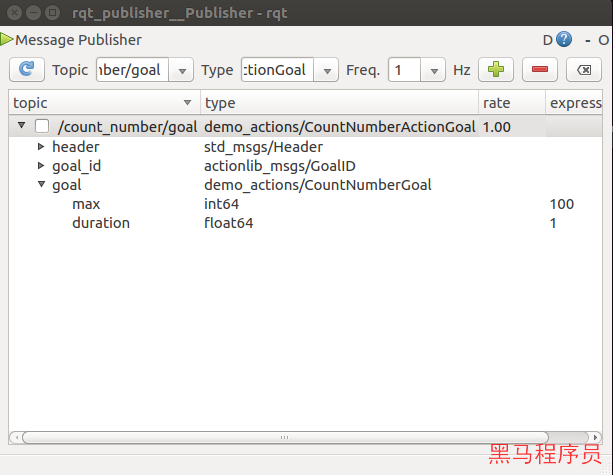
client端发送Goal
| rosrun rqt_publisher rqt_publisher
|