Param基本功能
什么是Param¶
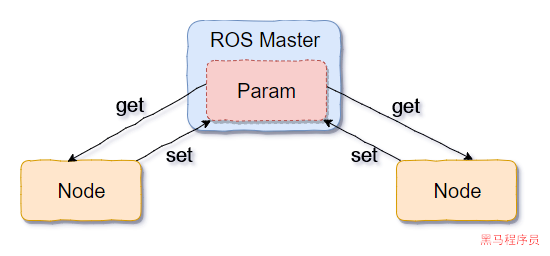
Param是Parameters的简写,意为参数。在ROS种,起到的作用是节点间共享数据。
实现的原理是将需要共享的数据存放到ROS Master中,这样所有的节点都可以访问。
存储规范¶
Param存储数据遵循的是YAML规范。
如果去简单的理解,可以认为是一个key value的组合,key是string类型,value 的类型可以有多种。
value的类型有:
- integer: 整数类型
- boolean: bool类型
- double: 小数类型
- list: 集合列表类型
- map: 字典类型
- binary: 二进制数据类型
命令行工具¶
ROS 提供了命令行工具,供我们对Param进行操作。
查询操作¶
1 | |
通过list命令,可以查询出当前所有可共享的参数。
1 2 3 4 | |
获取操作¶
1 | |
Tip
通过get命令可以获取要获取的值
设置操作¶
1 | |
Tip
通过set命令可以修改参数的值
删除操作¶
1 | |
Tip
可以产出对应的key
导出Param¶
1 | |
Tip
dump命令可以把当前的param导出为一个文件
导入Param¶
1 | |
Tip
load命令可以把yml文件导入到param中