小乌龟PID控制
rqt_plot使用¶
1 | |
运行plot可视化界面。
设置侦听的topic地址,接收绘制。
小乌龟的PID实现¶
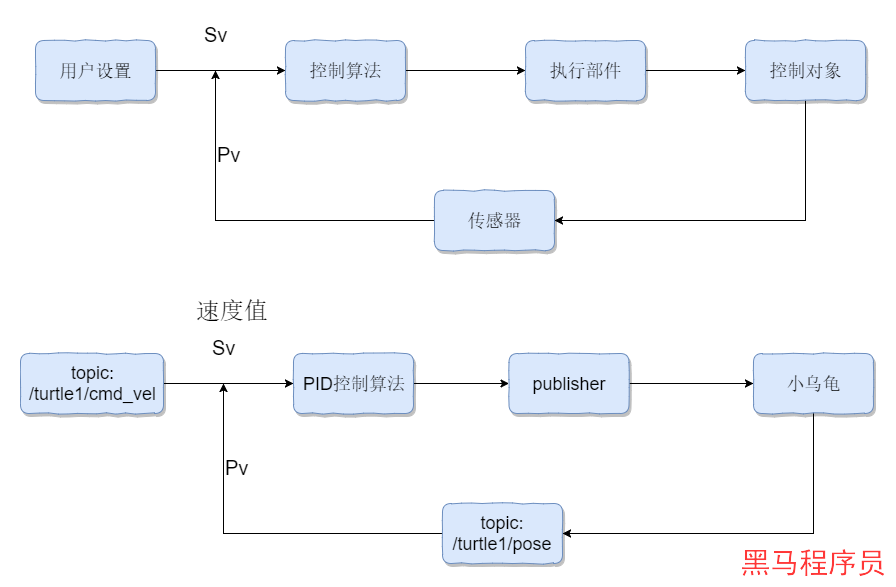
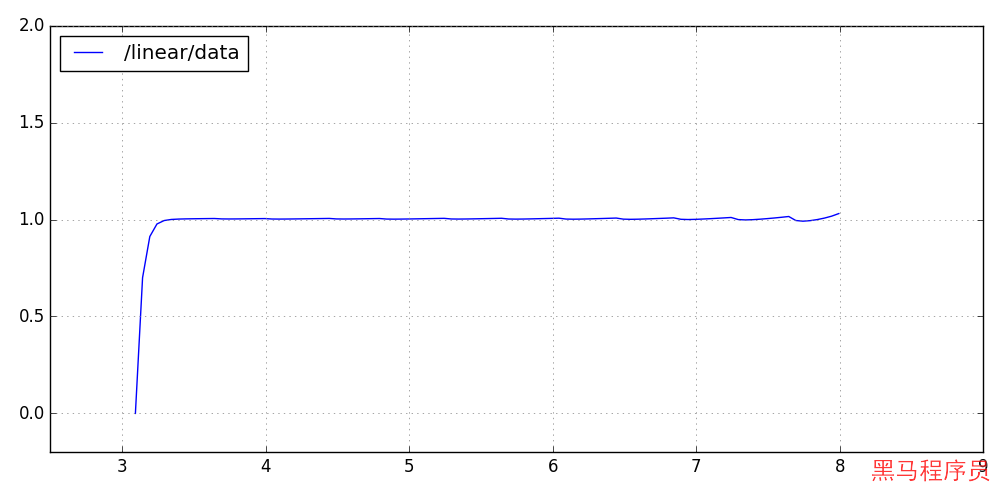
P控制逻辑¶
1 2 3 4 5 6 7 | |
Kp值为0.1时,速度的趋势
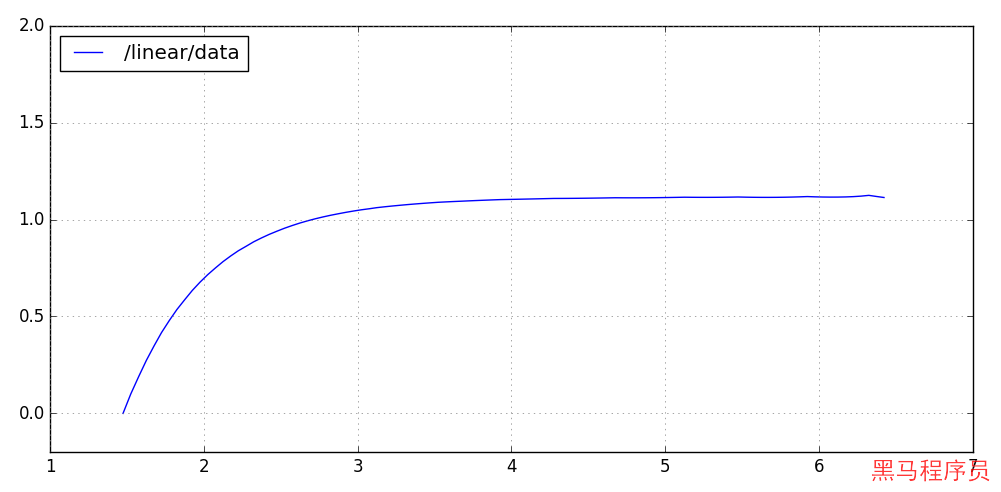
Kp值为0.4时,速度的趋势

Kp值为0.7时,速度的趋势
I控制逻辑¶
1 | |
D控制逻辑¶
1 2 | |
PID口诀¶
参数整定找最佳,从小到[大顺序查 先是比例后积分,最后再把微分加 曲线振荡很频繁,比例度盘要放大 曲线漂浮绕大湾,比例度盘往小扳 曲线偏离回复慢,积分时间往下降 曲线波动周期长,积分时间再加长 曲线振荡频率快,先把微分降下来 动差大来波动慢。微分时间应加长 理想曲线两个波,前高后低4比1 一看二调多分析,调节质量不会低