摄像头可视化
摄像头Node¶
源码下载:
https://github.com/ros-drivers/usb_cam
源码编译:
1 | |
调试节点¶
- 运行
usb_cam节点
1 | |
- 启动图像调试节点
1 | |
rviz调试节点¶
- 添加Image视图

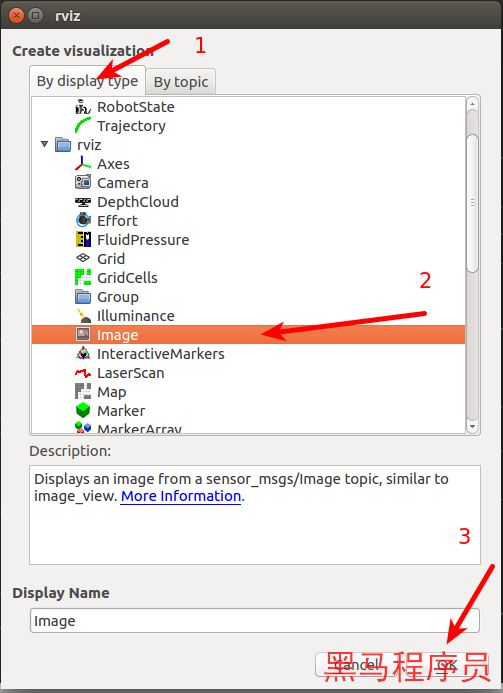
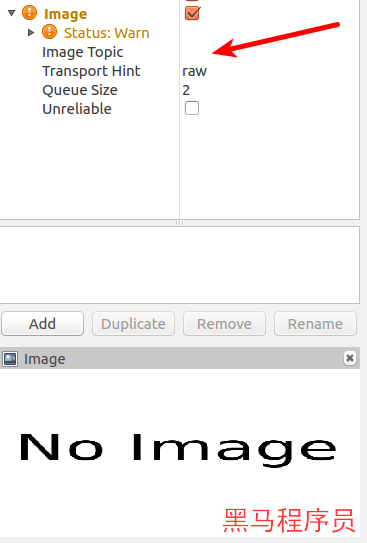
- 设置
Image Topic为/usb_cam/image_raw
源码下载:
https://github.com/ros-drivers/usb_cam
源码编译:
1 | |
usb_cam节点1 | |
1 | |
Image Topic为/usb_cam/image_raw