TF工作原理
坐标系¶
右手法则
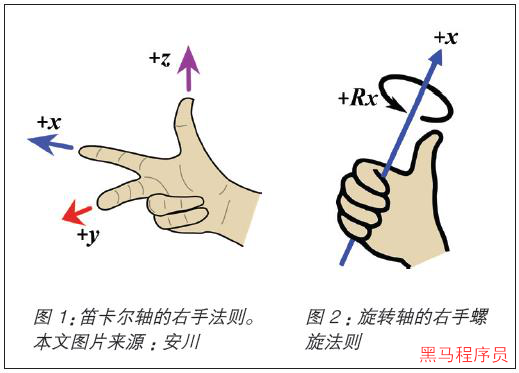
姿态RPY¶
- roll: 翻滚

- pitch: 俯仰

- yaw: 偏航
TF构成¶
ros中,tf工具包包含了三块内容:Broadcaster,Listener,TF转换工具
要弄清楚怎么使用TF工具包,首先我们要明确位置关系描述。
位置关系描述是通过相对坐标系来的。相对坐标系就是一个参照物,我们在这个参照物下,来说明自己的位置和姿态。
TF工作原理¶
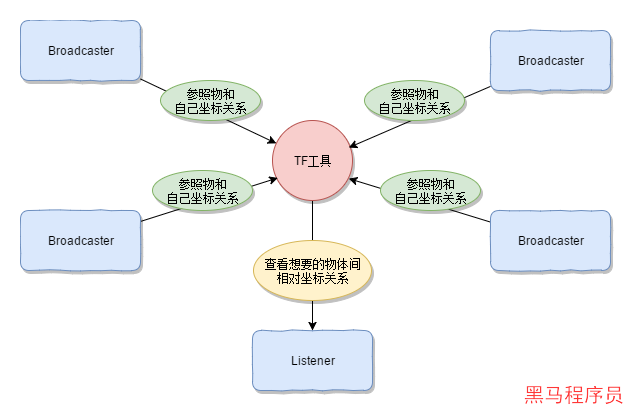
ROS中提供的是TF转换工具。转换是通过两个部分来完成的。
- Broadcaster负责向TF工具广播
参照物和自己的位置关系 - Listener负责向TF工具查看 想要知道的两个物体间的相对坐标
TF工具底层是通过向量来去实现的。