Topic理解
Topic通讯概念¶
ROS整个工程启动后的一个结构现状如图:
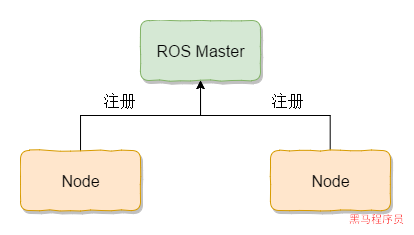
多个Node节点都需要到ROS Master进行注册。
每个Node完成自己的功能逻辑。有的时候Node和Node间需要有数据的传递,这个时候ROS提供了一种数据通讯机制。
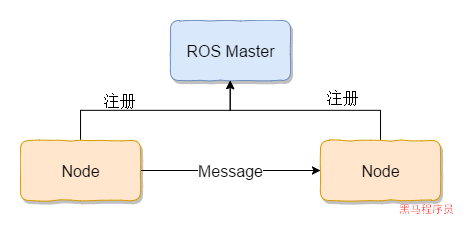
ROS 在设计Node间通讯机制的时候,考虑的还是比较周详的,设计了Topic通讯机制,如下图:

Node间进行通讯,其中发送消息的一方,ROS将其定义为**Publisher(发布者),将接收消息的一方定义为**Subscriber(订阅者)。考虑到消息需要广泛传播,ROS没有将其设计为点对点的单一传递,而是由**Publisher**将信息发布到**Topic(主题)**中,想要获得消息的任何一方都可以到这个**Topic**中去取数据。我们理解Topic的时候,可以认为**Topic**相当于一个聚宝盆,东西放进去后,不管同时有多少人来取,都可以拿到数据。