1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283 | #include "PSTwo.h"
#include <math.h>
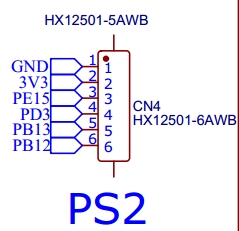
PSTwo::PSTwo(GPIO_TypeDef *di_port, uint16_t di_pin,
GPIO_TypeDef *do_port, uint16_t do_pin,
GPIO_TypeDef *cs_port, uint16_t cs_pin,
GPIO_TypeDef *clk_port, uint16_t clk_pin,
TIM_HandleTypeDef *tim, Car *car) :
di_port(di_port), di_pin(di_pin),
do_port(do_port), do_pin(do_pin),
cs_port(cs_port), cs_pin(cs_pin),
clk_port(clk_port), clk_pin(clk_pin),
tim(tim), car(car) {
}
PSTwo::~PSTwo() {}
void PSTwo::init() {
shortPoll();
shortPoll();
shortPoll();
enterConfig();
turnOnVibrationMode();
turnOnAnalogMode();
exitConfig();
}
void PSTwo::setEnable(bool flag) {
isStart = flag;
}
void PSTwo::tick() {
if(HAL_GetTick() - update_time < PS_CHECK_RATE ){
return;
}
update_time = HAL_GetTick();
button = readButtonData();
if (button == PSB_START && isStart == false) {
isStart = true;
// 第一次启动的时候,防止小车飞速
// joystickLeftX = 128;
// joystickLeftY = 128;
// joystickRightX = 128;
// joystickRightY = 128;
}
if (button == PSB_L2) {
isStart = false;
car->updateVel(0,0,0);
}
if (!isStart) return;
joystickLeftX = readAnalogData(PSS_LX);
joystickLeftY = readAnalogData(PSS_LY);
joystickRightX = readAnalogData(PSS_RX);
joystickRightY = readAnalogData(PSS_RY);
switch (button){
case PSB_PAD_UP:
car->updateVel(0.5,0,0);
break;
case PSB_PAD_LEFT:
car->updateVel(0,0.5,0);
break;
case PSB_PAD_RIGHT:
car->updateVel(0,-0.5,0);
break;
case PSB_PAD_DOWN:
car->updateVel(-0.5,0,0);
break;
case PSB_CIRCLE:
car->updateVel(0,0,-0.5);
break;
case PSB_SQUARE:
car->updateVel(0,0,0.5);
break;
case PSB_L1:
car->updateVel(0,0,0);
break;
}
printf("button:%d \r\n",button);
}
uint8_t PSTwo::readButtonData() {
clearData();
readData();
uint16_t key = (data[4] << 8) | data[3]; //这是16个按键 按下为0, 未按下为1
for (int i = 0; i < 16; ++i) {
if ((key & (1 << (mask[i] - 1))) == 0)
return i + 1;
}
return 0; //没有任何按键按下
}
uint8_t PSTwo::readAnalogData(uint8_t button) {
return data[button];
}
void PSTwo::readData() {
setCS(false);
execCmd(0x01); //开始命令
execCmd(0x42); //请求数据
for (int i = 2; i < 9; ++i) {
for (int ref = 0x01; ref < 0x100; ref <<= 1) {
setCLK(true);
delay(5);
setCLK(false);
delay(5);
setCLK(true);
if (isDIState()) {
data[i] = ref | data[i];
}
}
delay(16);
}
setCS(true);
}
void PSTwo::clearData() {
for (unsigned char &i : data) {
i = 0x00;
}
}
bool PSTwo::isRedLightMode() {
setCS(false);
execCmd(0x01);//开始命令
execCmd(0x42);//请求数据
setCS(true);
return data[1] != 0x73;
}
void PSTwo::vibration(uint8_t left, uint8_t right) {
setCS(false);
delay(16);
execCmd(0x01);//开始命令
execCmd(0x42);//请求数据
execCmd(0x00);
execCmd(left);
execCmd(right);
execCmd(0x00);
execCmd(0x00);
execCmd(0x00);
execCmd(0x00);
setCS(true);
delay(16);
}
void PSTwo::shortPoll() {
setCS(false);
delay(16);
execCmd(0x01);//开始命令
execCmd(0x42);//请求数据
execCmd(0x00);
execCmd(0x00);
execCmd(0x00);
setCS(true);
delay(16);
}
void PSTwo::enterConfig() {
setCS(false);
delay(16);
execCmd(0x01);
execCmd(0x43);
execCmd(0X00);
execCmd(0x01);
execCmd(0x00);
execCmd(0X00);
execCmd(0X00);
execCmd(0X00);
execCmd(0X00);
setCS(true);
delay(16);
}
void PSTwo::exitConfig() {
setCS(false);
delay(16);
execCmd(0x01);
execCmd(0x43);
execCmd(0X00);
execCmd(0x00);
execCmd(0x5A);
execCmd(0x5A);
execCmd(0x5A);
execCmd(0x5A);
execCmd(0x5A);
setCS(true);
delay(16);
}
void PSTwo::turnOnVibrationMode() {
setCS(false);
delay(16);
execCmd(0x01);
execCmd(0x4D);
execCmd(0X00);
execCmd(0x00);
execCmd(0X01);
setCS(true);
delay(16);
}
void PSTwo::turnOnAnalogMode() {
setCS(false);
execCmd(0x01);
execCmd(0x44);
execCmd(0X00);
execCmd(0x01); //analog=0x01;digital=0x00 软件设置发送模式
execCmd(0x03); //Ox03锁存设置,即不可通过按键“MODE”设置模式。
//0xEE不锁存软件设置,可通过按键“MODE”设置模式。
execCmd(0X00);
execCmd(0X00);
execCmd(0X00);
execCmd(0X00);
setCS(true);
delay(16);
}
void PSTwo::setDO(bool high) {
HAL_GPIO_WritePin(do_port, do_pin, high ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
void PSTwo::setCLK(bool high) {
HAL_GPIO_WritePin(clk_port, clk_pin, high ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
void PSTwo::setCS(bool high) {
HAL_GPIO_WritePin(cs_port, cs_pin, high ? GPIO_PIN_SET : GPIO_PIN_RESET);
}
void PSTwo::execCmd(uint8_t cmd) {
volatile uint16_t ref = 0x01;
data[1] = 0;
for (ref = 0x01; ref < 0x0100; ref <<= 1) {
if (ref & cmd) {
setDO(true); //输出一位控制位
} else {
setDO(false);
}
setCLK(true); //时钟拉高
delay(5);
setCLK(false);
delay(5);
setCLK(true);
if (isDIState()) {
data[1] = ref | data[1];
}
}
delay(16);
}
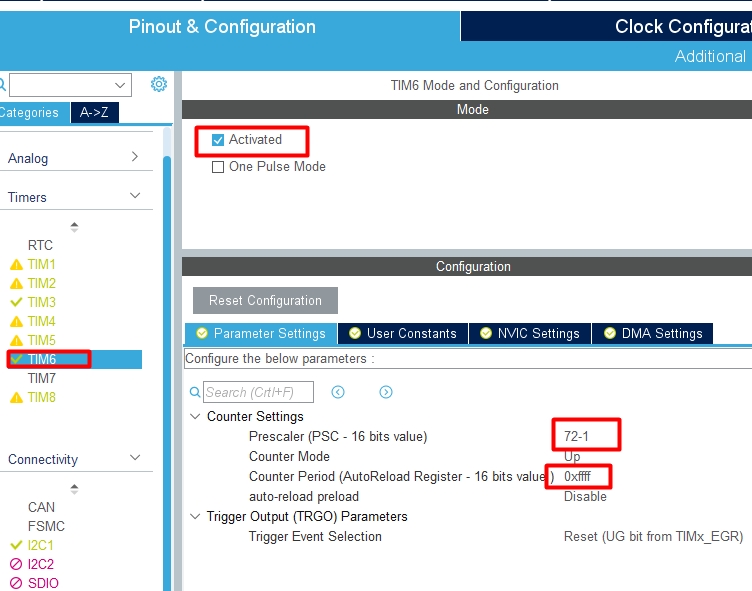
void PSTwo::delay(uint16_t t) {
uint16_t differ = 0xffff - t - 5;
/*为防止因中断打断延时,造成计数错误.
如从0xfffE开始延时1us,但由于中断打断
(此时计数器仍在计数),本因计数至0xffff)
便停止计数,但由于错过计数值,并重载arr值,
导致实际延时(0xffff+1)t
*/
HAL_TIM_Base_Start(tim);
__HAL_TIM_SetCounter(tim, differ);
while (differ < 0xffff - 5) {
differ = __HAL_TIM_GetCounter(tim);
}
HAL_TIM_Base_Stop(tim);
}
bool PSTwo::isDIState() {
return HAL_GPIO_ReadPin(di_port, di_pin) == GPIO_PIN_SET;
}
|