蓝牙模块控制¶
本章我们来学习一下如何使用蓝牙模块控制我们的小车.

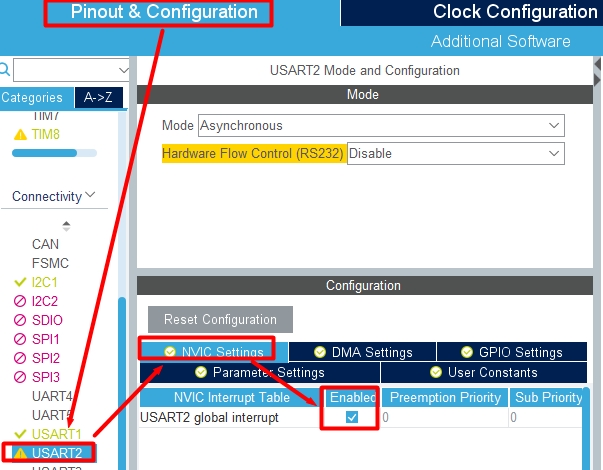
在我们的开发板上已经预留了usart2来连接这个蓝牙模块,我们只需要把它插上去就可以像使用普通串口一样来使用它. 这个蓝牙模块其实是把接收到的信息传输到了USART2,并且它的波特率得设置为9600.所以我们要按照下图来对USART2进行配置

这个串口发送过来的数据比较单一,我们可以用前面我们学习过的中断方式去接收它! 同理我们需要开启串口的中断
好啦,Cubemx的响应配置已经搞定啦! 下面我们就要开始撸代码啦!
- 第一步,我们要在程序中开启中断接收的方式
1 2 | |
- 第二步,重写串口中断接收处理回调函数,注意要在回调函数中重新开启中断接收,否则只会接收一次.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 | |
- 第三步, 我们就可以去应用市场下载蓝牙串口调试助手来控制程序逻辑啦!