坐标系理解
物体空间描述¶
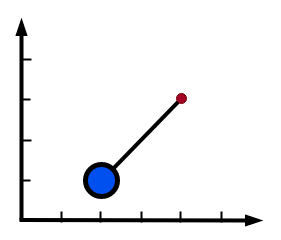
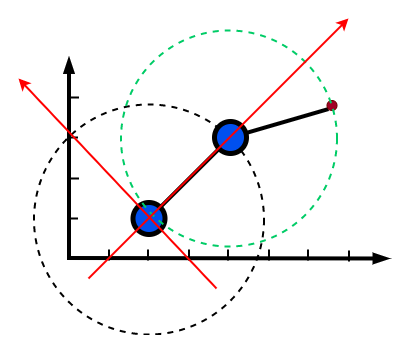
以上是一个固定轴的棍子,我们要描述他的空间信息。
我们可以通过坐标和角度来去描述
- 坐标(2, 1)
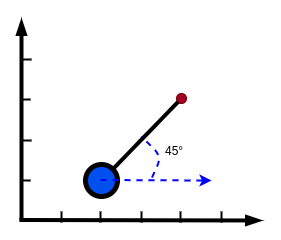
- 角度45度
其实坐标就是位置
角度就是姿态。
也就是描述一个物体,我们只需要位置和姿态就可以进行描述了。
我们来看看三维空间:
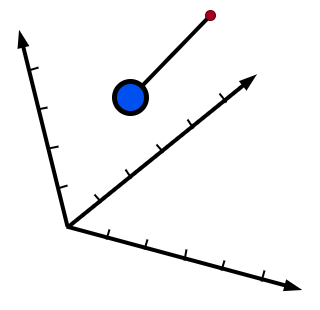
也是 位置和姿态,位置是(x,y,z),姿态是三个轴的角度(绕x,绕y,绕z)
关节和坐标系¶
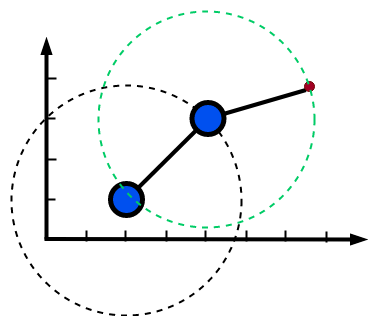
上图中,是一个两个自由度的活动系统。
两个连杆,两个关节。
对于这个系统而言,我们需要知道的是末端可到达的范围。
在这个系统中,我们回去定义一个参考坐标系。上图中的黑色坐标系就是参考坐标系。
通常要去理解计算的是末端的位置或者是旋转的角度。
我们在整个系统中就得去构建关联的坐标系。
对于第一个连杆,我们会为他创建一个坐标系。通常会如上图红色坐标系。
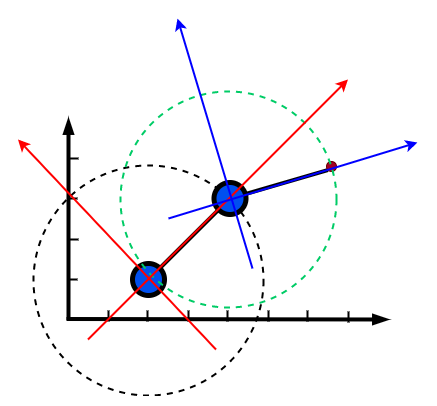
对于第二个连杆,我们也会为他创建一个坐标系。通常会如上图蓝色坐标系。
我们思考几个问题:
- 为什么要为连杆建立坐标系
- 为什么要按照这种方式建立坐标系
为什么要建立独立坐标系¶
物件在一个系统中,通常可以按照这个系统的坐标系来去描述,但是我们有的时候还单独为这个物件建立坐标系。
原因在于,物件是活动的,物件的活动是有规律的。有的时候,这种规律不是和当前系统有直接关系的,我们构建的坐标系是为了和物件活动建立直接关系的。通过关系的传递最后和整个系统的坐标系建立关系的。
建立坐标系的方式¶
我们要明确以上坐标系建立的特点:
- 围绕着关节建立
- 某个轴和物件连杆方向上是重合的
关节位置通常我们定义为坐标原点,是为了方便模拟计算。
沿着连杆方向,也是为了方便计算,原因在于描述末端点的时候会以新坐标系来描述,这个时候,如果不重合,则会有两个方向的值。重合的话,则按照连杆长度来计算。
思考¶
关于物体的末端位置计算,我们按照关节构建坐标系,对于末端关节位置,我们会以整个参考坐标系来描述,这里就牵涉到了坐标转换问题,因此我们需要解决坐标转换相关的问题,才能找到物体运动的规律。