moveit助理
作用¶
帮助我们使用urdf构建机器项目,达到运动规划等功能。
使用流程¶
- 创建机器人urdf模型
- 配置模型生成package
- 运动控制逻辑
构建步骤¶
打开工具¶
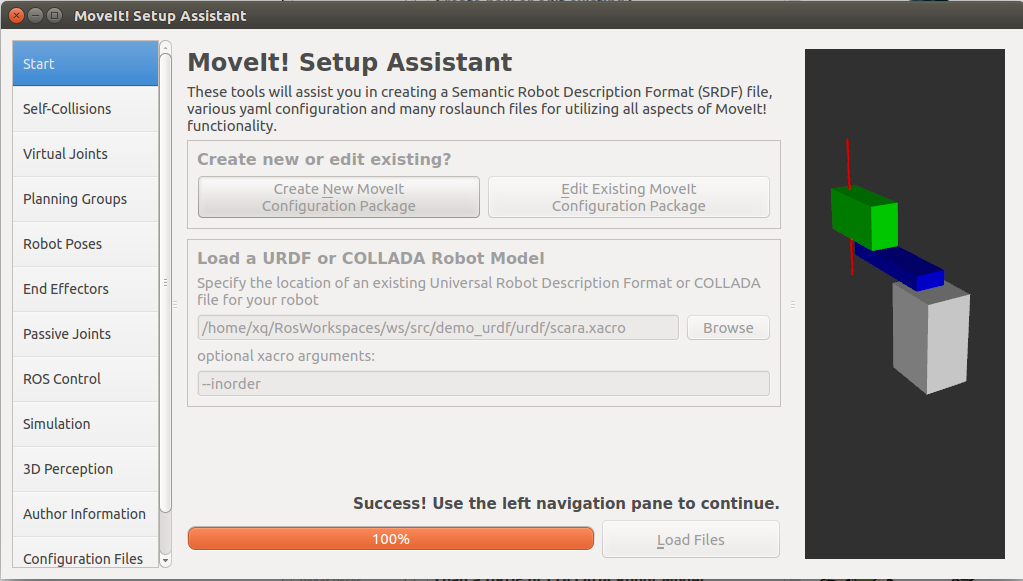
打开Moveit setup assistant工具
rosrun moveit_setup_assistant moveit_setup_assistant
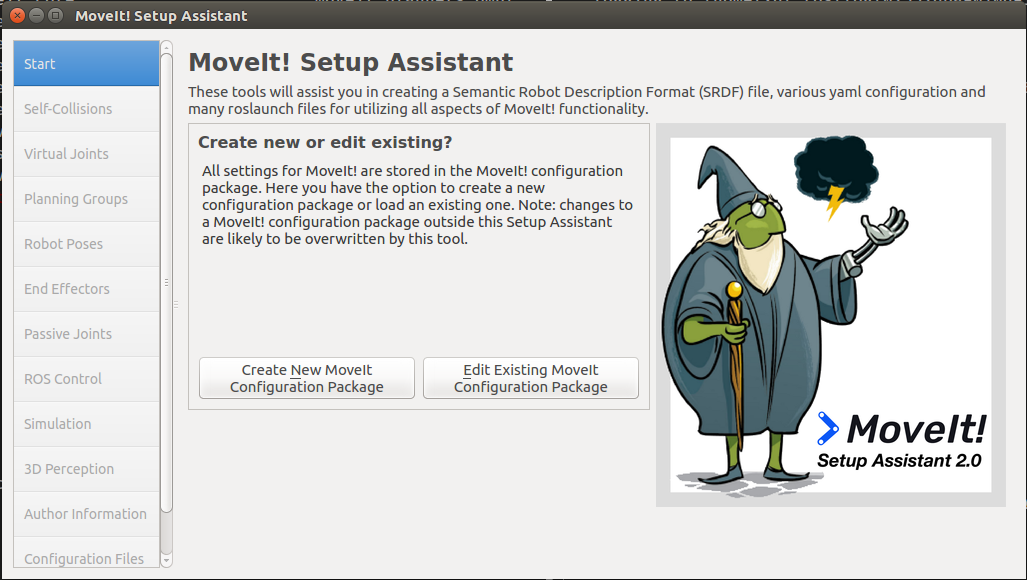
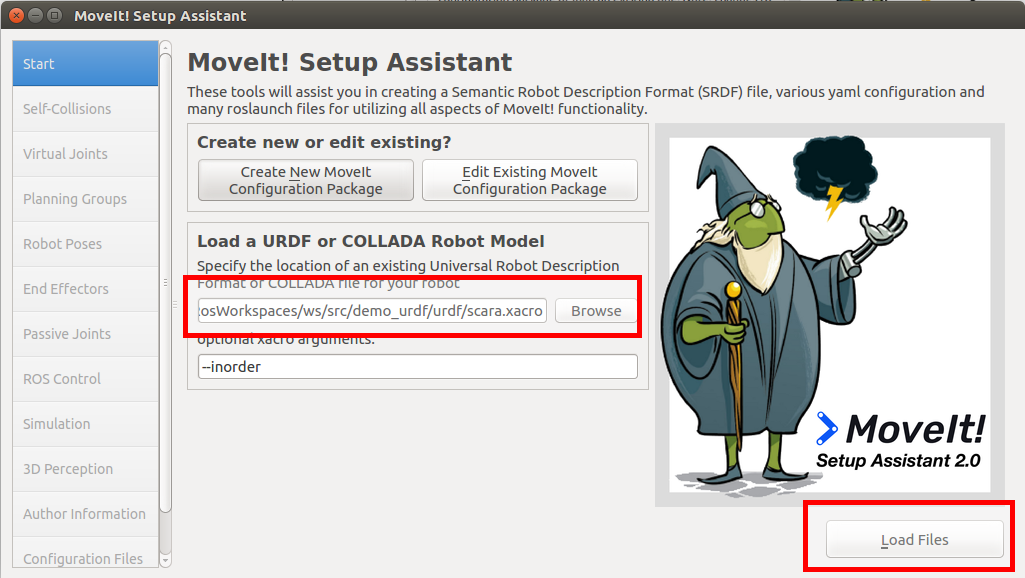
创建package¶

选择urdf文件:
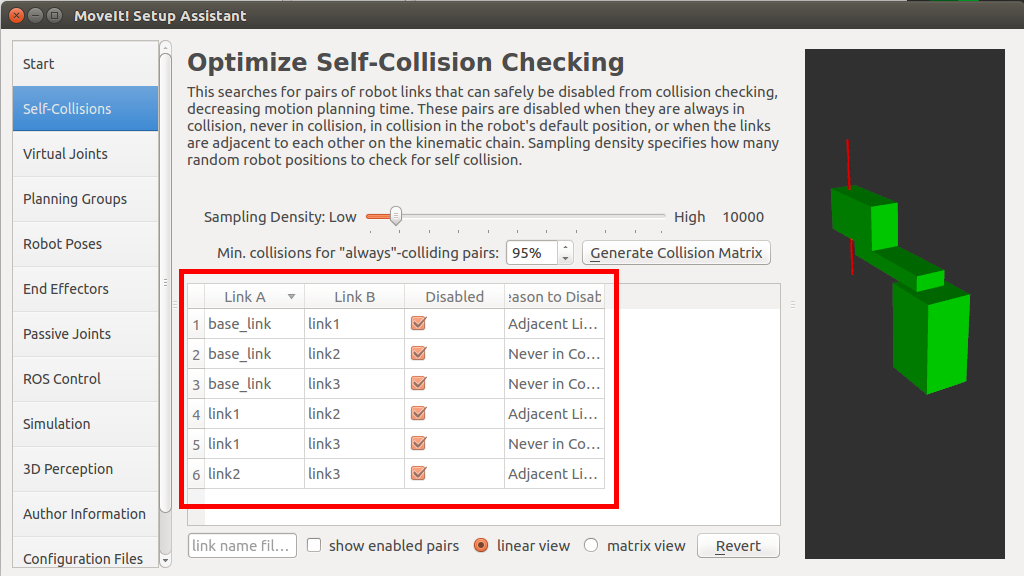
配置碰撞¶
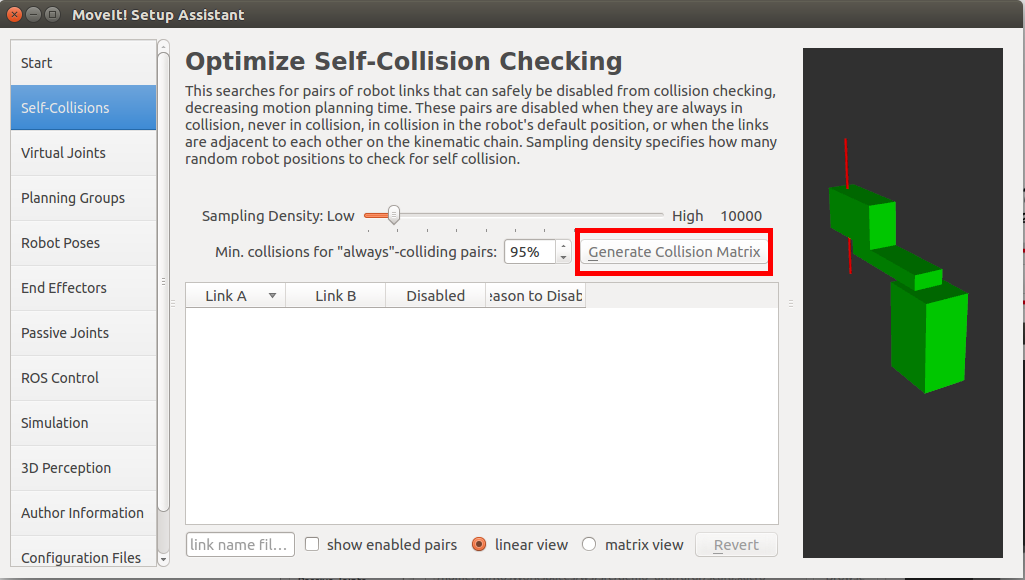
点击Generate Collision Matrix生成碰撞检查矩阵
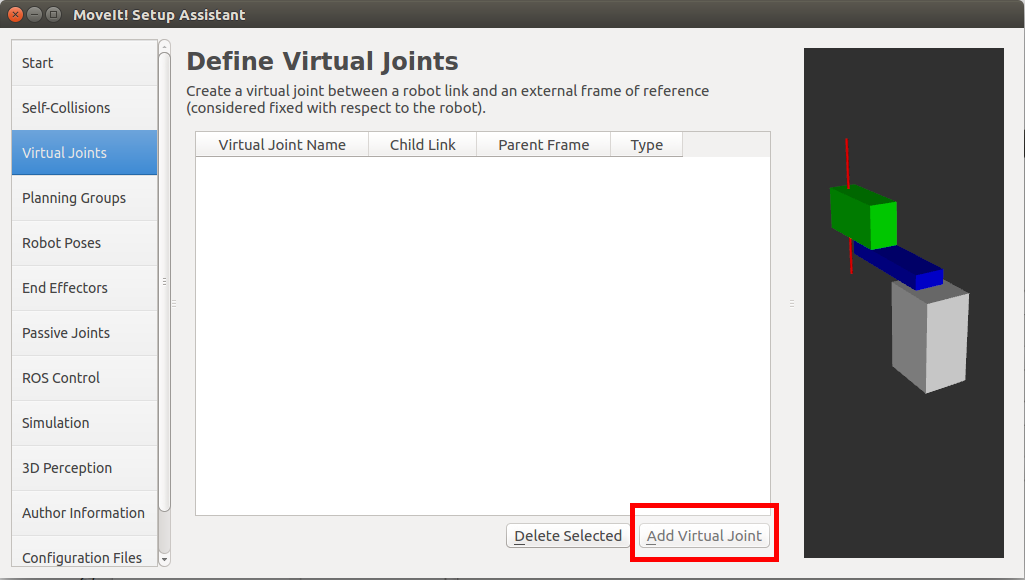
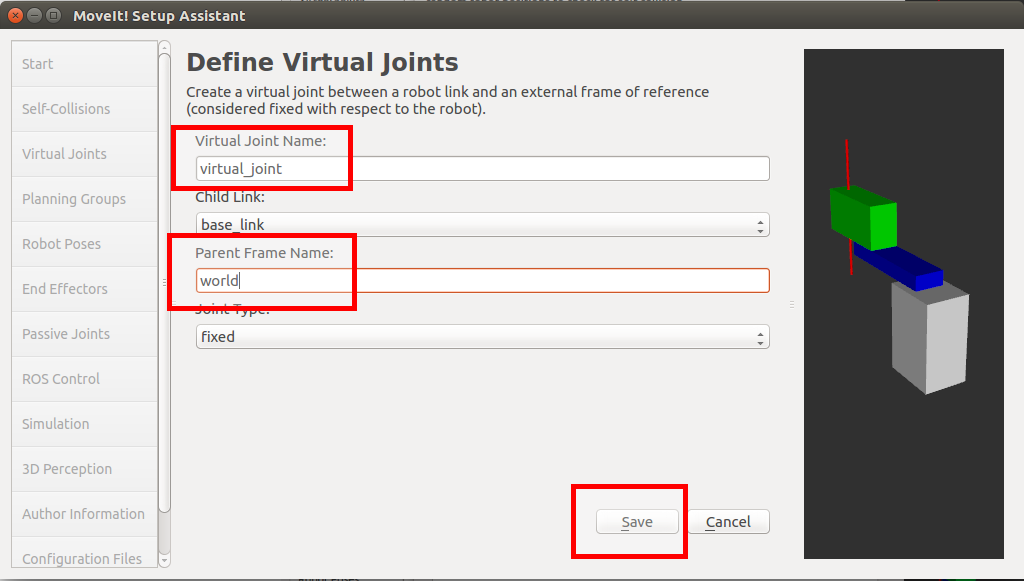
添加虚关节¶
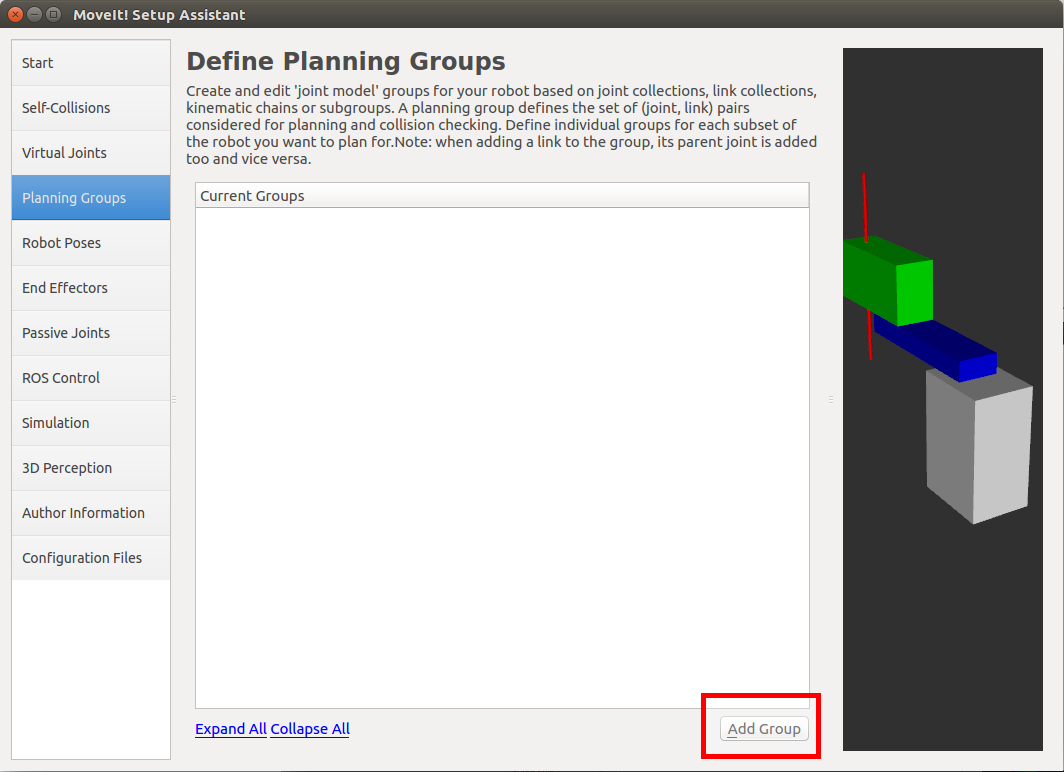
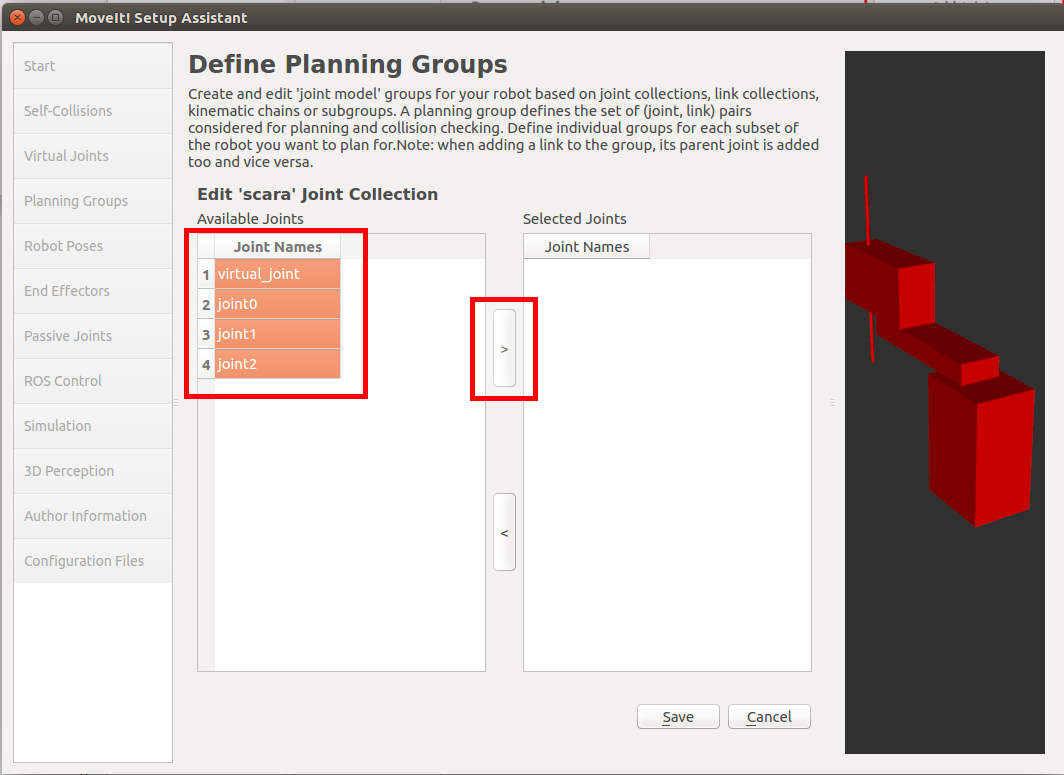
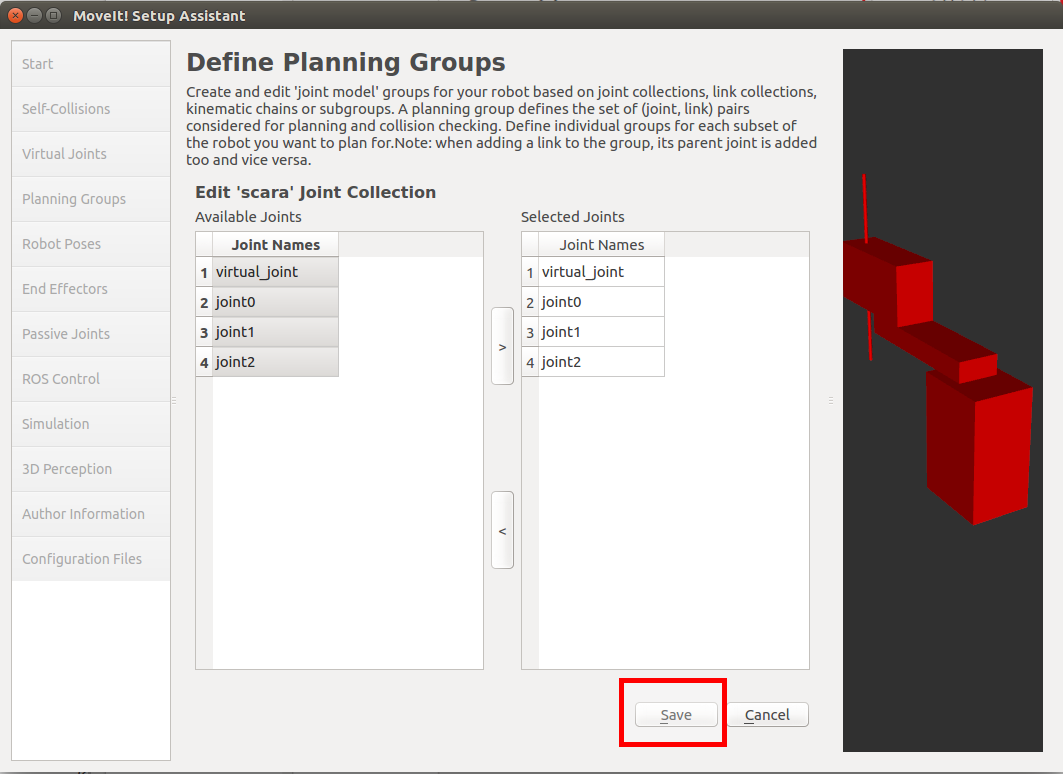
添加Group¶
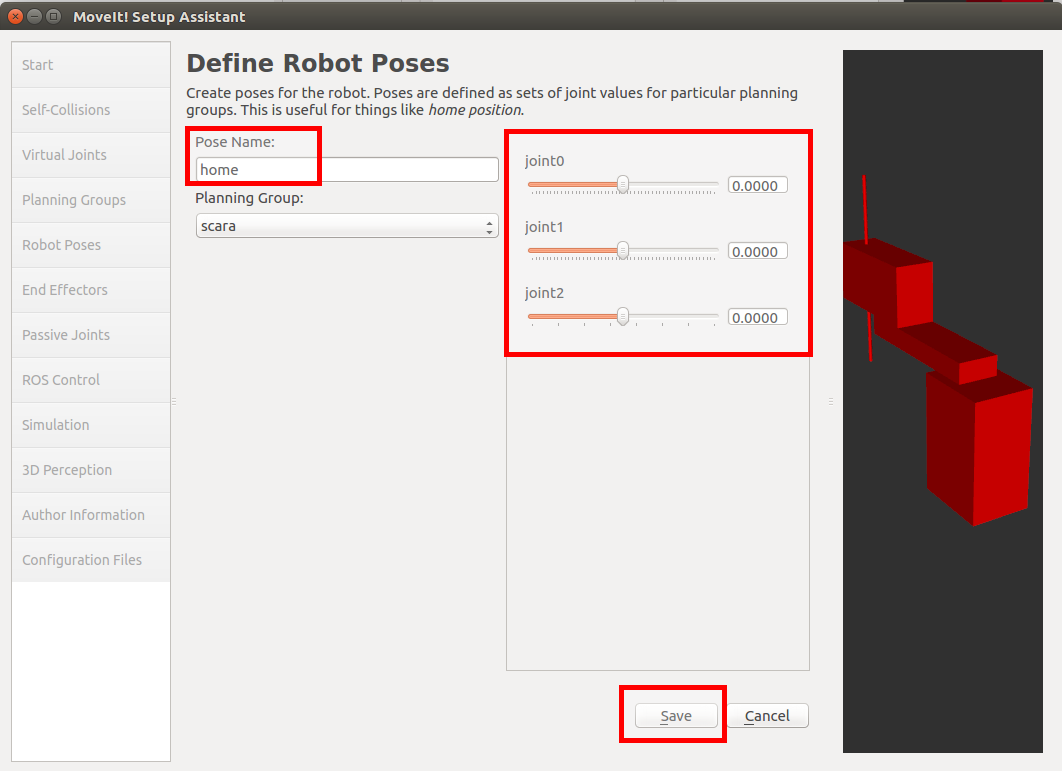
预定义机器人姿态¶

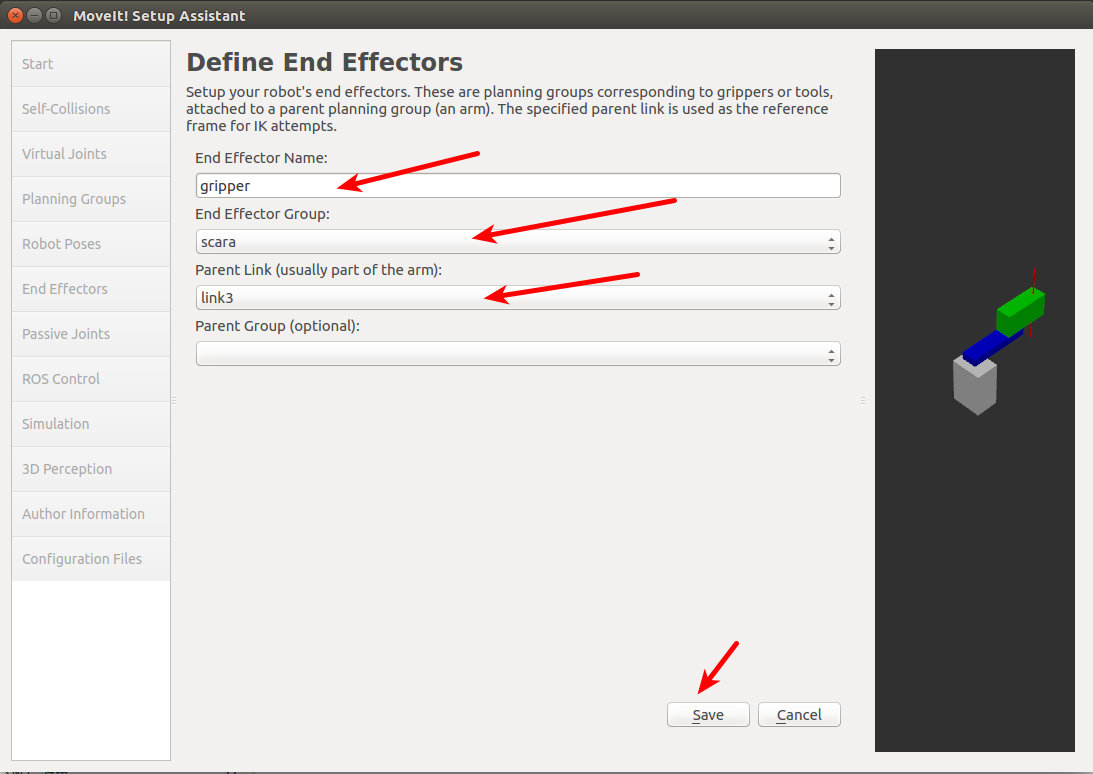
末端工具添加¶
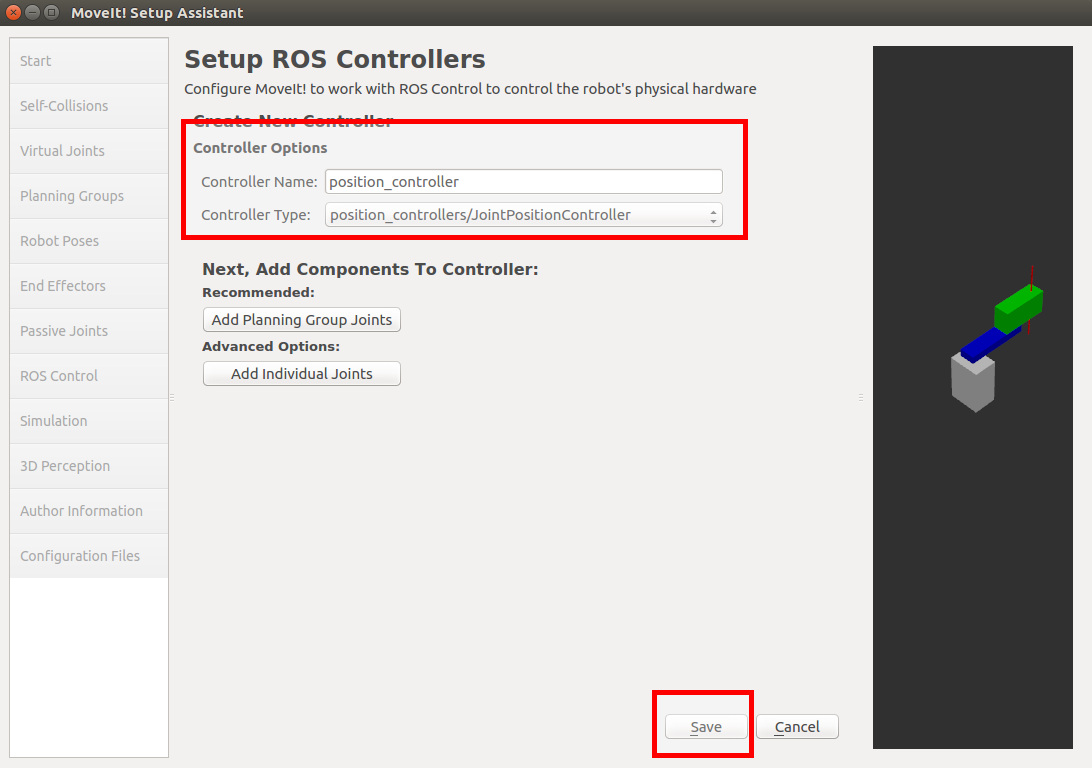
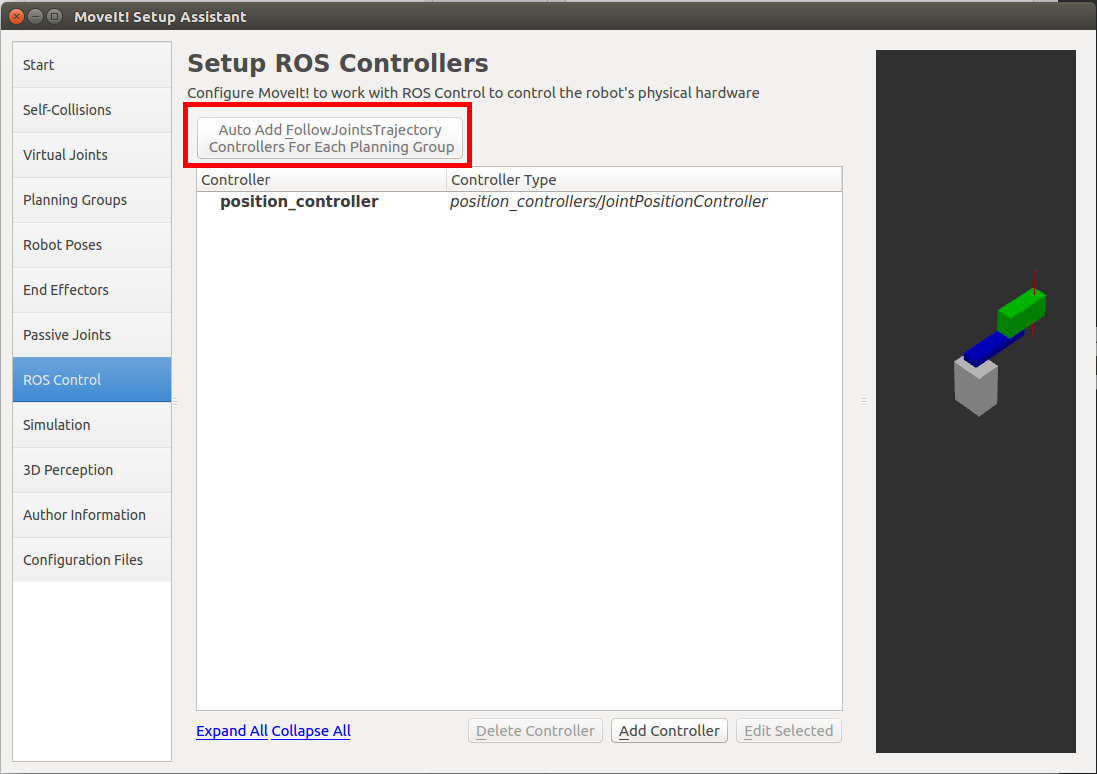
控制器添加¶

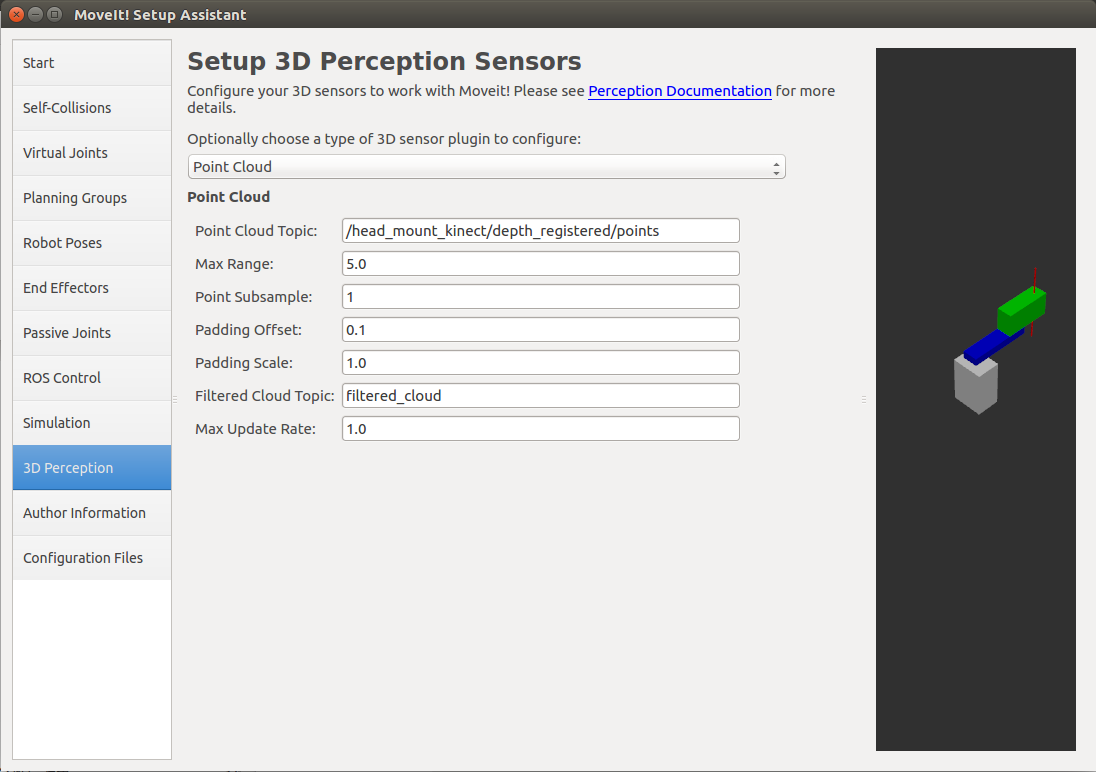
3D Percetion¶
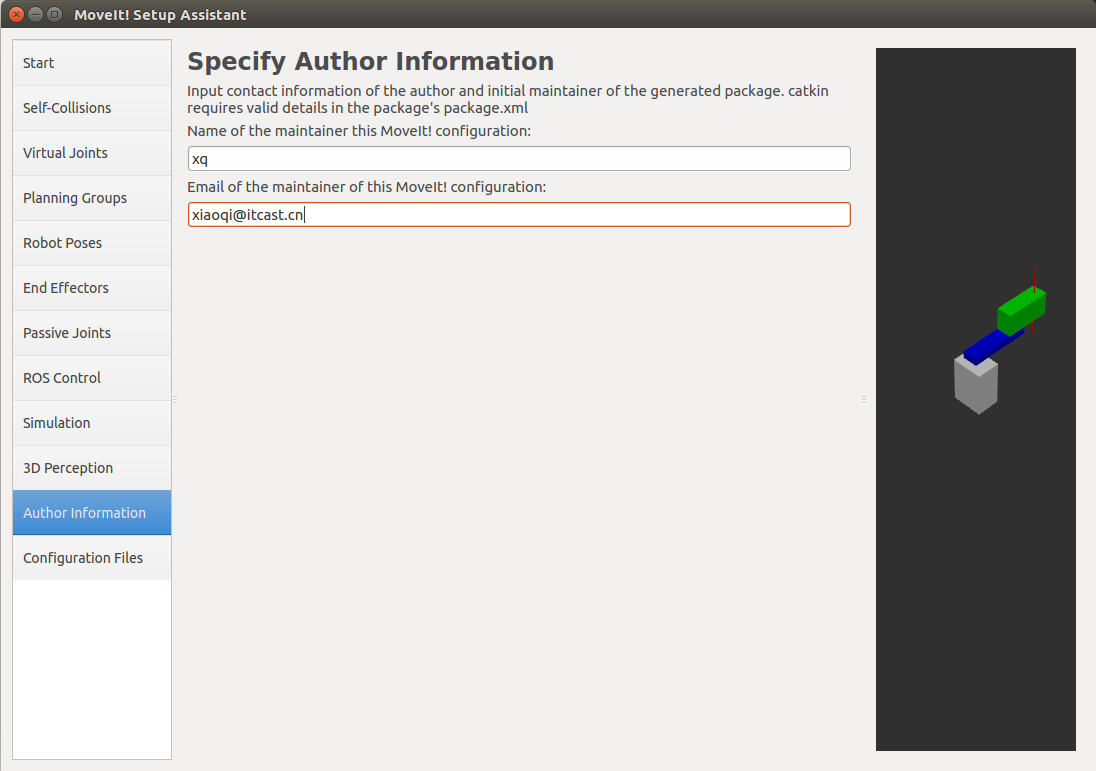
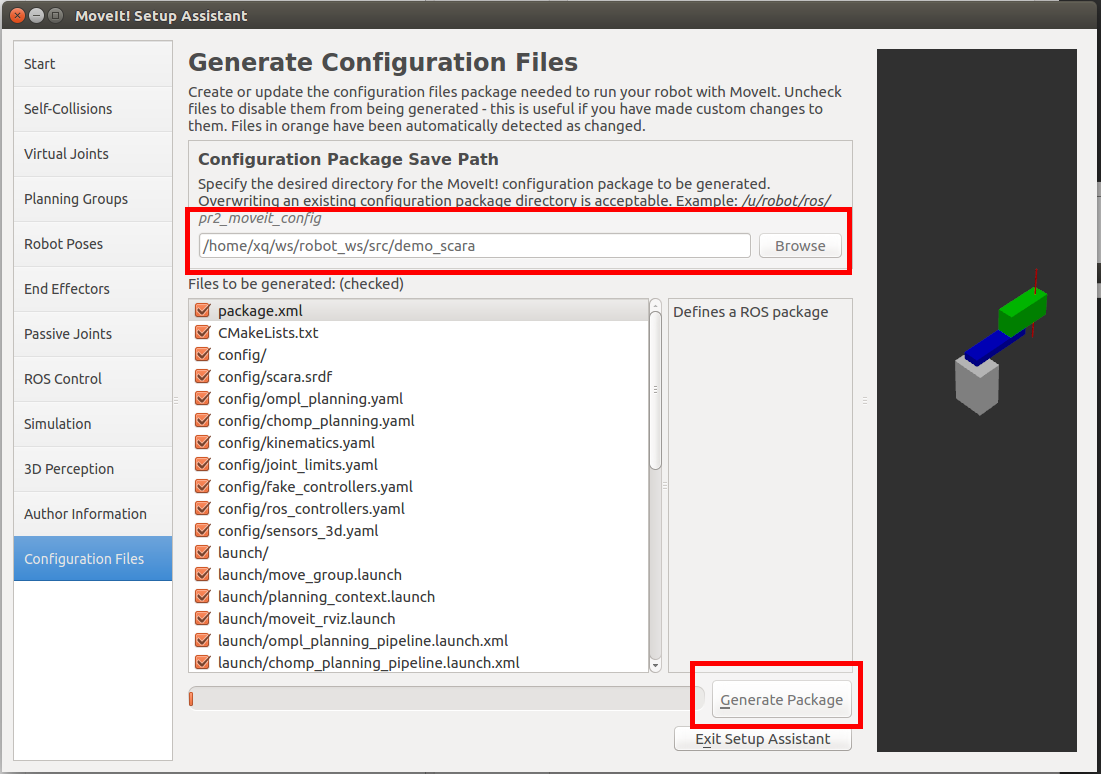
生成package¶
填写邮箱等信息