循迹小车
循迹小车¶
循迹小车制作主要是让小车实现根据黑线的路径进行循迹的功能.
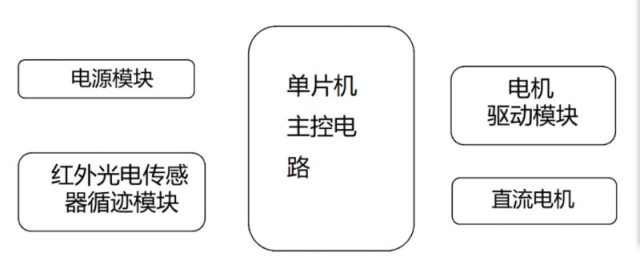
智能小车可以分成三个部分——传感器部分、控制器部分、执行器部分
控制器部分:接收传感器部分传递过来的信号,并根据事前写入的决策系统(软件程序),来决定机器人对外部信号的反应,将控制信号发给执行器部分。
执行器部分:驱动机器人做出各种行为,包括发出各种信号(点亮发光二极管、发出声音)的部分,并且可以根据控制器部分的信号调整自己的状态。对机器人小车来说,最基本的就是轮子。
传感器部分:机器人用来读取各种外部信号的传感器,以及控制机器人行动的各种开关。
系统构成-系统框图
PID控制¶
https://baijiahao.baidu.com/s?id=1687928966424595013&wfr=spider&for=pc
对自动驾驶来说,控制就是指使用方向盘、油门和刹车,将车驾驶到期望的位置。我们开车在十字路口或拐弯时候,可以凭着直觉和经验来决定拐弯的角度大小,加速的时机,以及是否需要刹车等。我们需要将这种直觉教给计算机。
我们经常把控制算法称之为控制器,PID控制器就是最常见、最基础的控制器之一。在介绍PID控制器之前,我们先了解关于控制的大的分类,根据是否有反馈可以分为开环控制和闭环控制。
开环控制¶
开环控制,全称开环控制系统(Open Loop Control System),又称为无反馈系统。即系统的输入可以影响输出,但是 输入不受输出影响 的系统。输入到输出的信号是单向传递的。
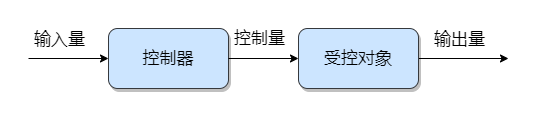
以下为生活中开环系统的一些例子:
| 控制系统 | 输入量 | 控制器 | 受控对象 | 输出量 |
|---|---|---|---|---|
| 风扇调速 | 设置档位 | 控制电路 | 风扇电机 | 风扇转速 |
| 红外感应门 | 人体热辐射 | 控制电路 | 自动门电机 | 门打开 |
| 洗衣机 | 设置洗衣时间 | 控制电路 | 水阀&电机 | 洁净衣服 |
| 电饭煲 | 电源开关 | 控制电路 | 锅底加热器 | 锅内温度 |
| 水箱注水 | 水龙头开关 | 进水阀门 | 水流 | 水箱水位 |
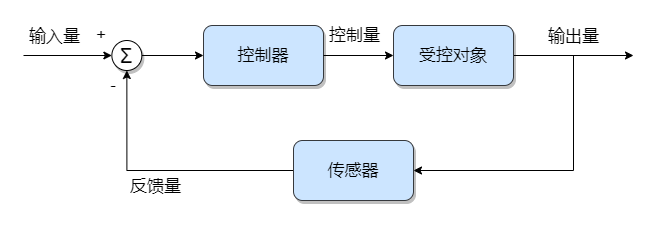
闭环控制¶
闭环控制,全称闭环控制系统(Closed Loop Control System):系统的输出可以通过 反馈回路 对输入造成影响,进而影响控制过程的系统。
常见闭环控制系统场景
- 车道线校正
- 车速控制
- 四轴飞行器高度控制
- 变频空调温控
- 锅炉温控
位置式PID¶

e(k): 用户设定的值(目标值) - 控制对象的当前的状态值
比例P : e(k)
积分I : ∑e(i) 误差的累加
微分D : e(k) - e(k-1) 这次误差-上次误差
增量式PID¶

比例P : e(k)-e(k-1) 这次误差-上次误差
积分I : e(i) 误差
微分D : e(k) - 2e(k-1)+e(k-2) 这次误差-2*上次误差+上上次误差
注意:结果只是增量,需要和前面的增量进行累加才能使用
差速运行¶
左转:右轮速度快,左轮速度慢
右转:左轮速度快,右轮速度慢
注意:
pid计算的结果是两个轮子的差速调整值
循迹小车实现¶
from genki.car import linetrack, motor
import ohos
import os
import socket
high_speed = 64
low_speed = 59
speed = high_speed
kp = 0.8
ki = 0.001
kd = 0.35
# 上一次误差
last_error = 0
# 上上次误差
prev_error = 0
# pid计算的结果
delta_u = 0.0
# 增量
delta_t = 0.0
def get_pos(val):
acc = 0
count = 0
for i in range(0, 7, 1):
if ((val >> i) & 0x01) == 1:
count += 1
if i < 3:
acc += 16 * (3 - i)
elif i == 3:
acc += 0
else:
acc += -16 * (i - 3)
if count > 0:
return acc / count
return 0
def track_task(arg):
global speed
print('start task')
enable = linetrack.isEnable()
print(enable)
global delta_t, delta_u, prev_error, last_error
while enable:
state = linetrack.getState()
# 重置
delta_t = 0.0
if state == 0xffff:
motor.run(0, 0)
last_error = 0
prev_error = 0
delta_t = 0
delta_u = 0
os.sleep(0.1)
continue
if state != 0x00:
err = get_pos(state)
else:
err = last_error
if abs(err) > 20:
speed = low_speed
else:
speed = high_speed
delta_t = kp * (err - last_error)
delta_t += ki * err
delta_t += kd * (err - 2 * last_error + prev_error)
delta_u += delta_t
prev_error = last_error
last_error = err
motor.run(int(speed + delta_u), int(speed - delta_u))
os.sleep(0.02)
if __name__ == '__main__':
print('app start')
ohos.run(track_task, 0)