版本介绍
历史版本¶
| 海报 | 版本名称 | 吉祥物 | 发布时间 | 截至支持时间 |
|---|---|---|---|---|
 |
ROS Noetic Ninjemys HOTHOT | 开发版本选择May 23rd, 2020 | May, 2025 (Bionic EOL) | |
 |
ROS Melodic Morenia HOTHOT | 开发版本选择May 23rd, 2018 | May, 2023 (Bionic EOL) | |
 |
Lunar Loggerhead | May 23rd, 2017 | May, 2019 | |
 |
ROS Kinetic Kame HOTHOT | May 23rd, 2016 | April, 2021 (Xenial EOL) | |
 |
ROS Jade Turtle | May 23rd, 2015 | May, 2017 | |
 |
ROS Indigo lgloo | July 22nd, 2014 | April, 2019 (Trusty EOL) | |
 |
ROS Hydro Medusa | September 4th, 2013 | May, 2015 | |
 |
ROS Groovy Galapagos | December 31, 2012 | July, 2014 | |
 |
ROS Fuerte Turtle | April 23, 2012 | 废弃废弃 | |
 |
ROS Electric Emys | August 30, 2011 | 废弃废弃 | |
 |
ROS Diamondback | March 2, 2011 | 废弃废弃 | |
 |
ROS C Turtle | August 2, 2010 | 废弃废弃 | |
 |
ROS Box Turtle | March 2, 2010 | 废弃 |
ROS1和ROS2区别¶
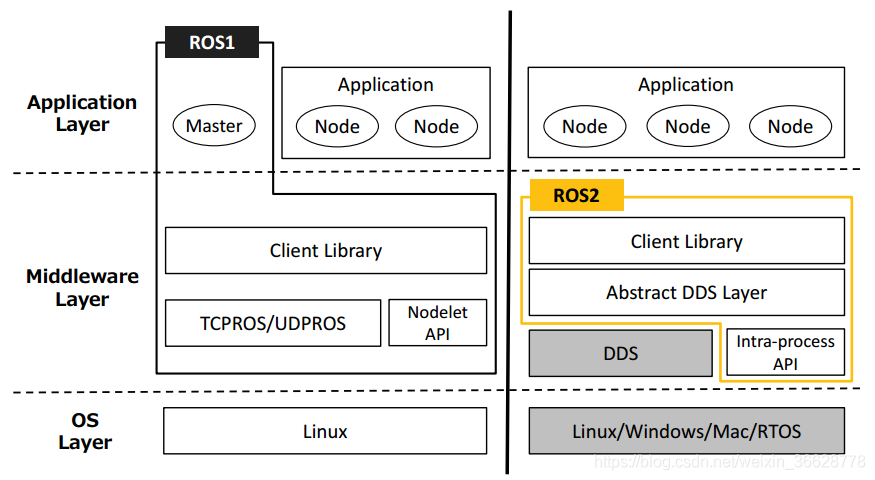
- ROS1主要构建于Linux系统之上,一定有很多同学希望在windows或者RTOS上应用ROS开发机器人,原来这个期望是很难实现的,但是ROS2带来了改变,支持构建的系统包括Linux、windows、Mac、RTOS,甚至没有操作系统的裸机。
- ROS1的通讯系统基于TCPROS/UDPROS,强依赖于master节点的处理。ROS2的通讯系统是基于DDS的(Data Distribution Service),同时在ROS2内部提供了DDS的抽象层实现,有了这个抽象层,用户就可以不去关注底层的DDS使用了哪个商家的API。