PID 控制器总结¶
我们总结PID对波动图形的影响,如下图:
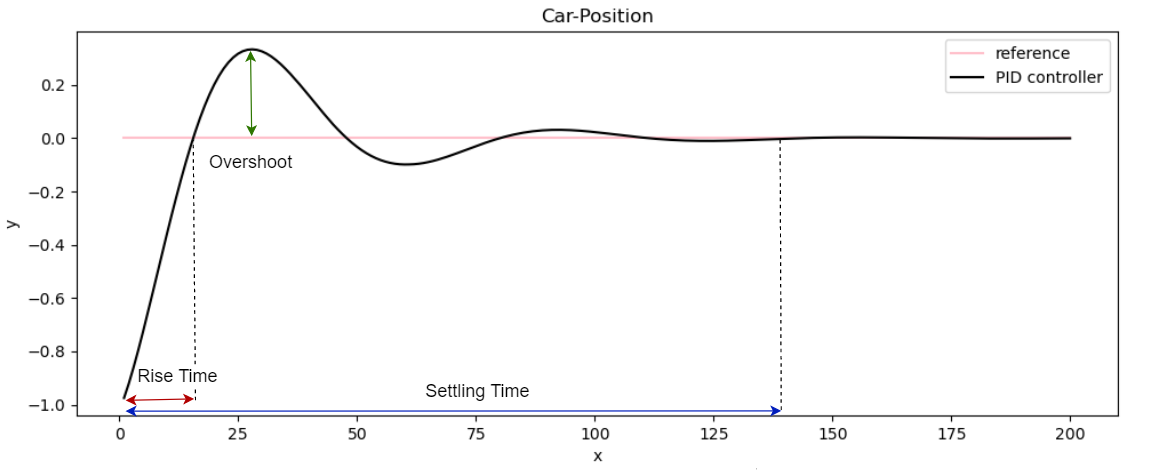
对应影响如下表格:
| Rise Time (上升时间) | Overshoot(过冲距离) | Settling Time(稳定时间) | |
|---|---|---|---|
| K_p | 减少 | 增加 | 增加(微弱) |
| K_i | 减少(微弱) | 增加 | 增加 |
| K_d | 有影响(微弱) | 减少 | 减少 |
PID控制调整选取什么样的值要根据具体的需求场景和系统的特性,以上表格提供了一些调优过程的准则,最好的做法是根据系统的需求入手,比如希望尽快到目标值附近,希望尽可能少的造成过冲,尽可能快的进入稳定状态等。
例如:如果希望减少 上升时间,那么就可以增加P的增益系数 K_p 值,但是此时过冲距离又会增加,所以,我们可以增加D的增益系数 K_d 的值,来减少过冲,提高稳定性。