Twiddle 调校最优解¶
为了避免人为的猜测、试错来获取比较好的PID值,我们可以设计一种自动化的调参逻辑循环,根据使指定目标函数的值达到最小时,得到更加优秀的参数列表。
一种更智能、自动的方法是使用梯度下降算法。 前提是您从三个增益的初始猜测向量开始。 通常对P使用小的非零值,对I和D使用0。 然后,分别对每个收益进行小幅更改,然后测试目标函数是否降低。 如果降低了,将沿相同方向不断更改参数,否则尝试沿相反方向调整参数。 如果增益值的增加或减少均不会降低成本函数,则减小增益增量的大小并重复。 整个循环应继续进行,直到增量大小降至某个阈值以下。
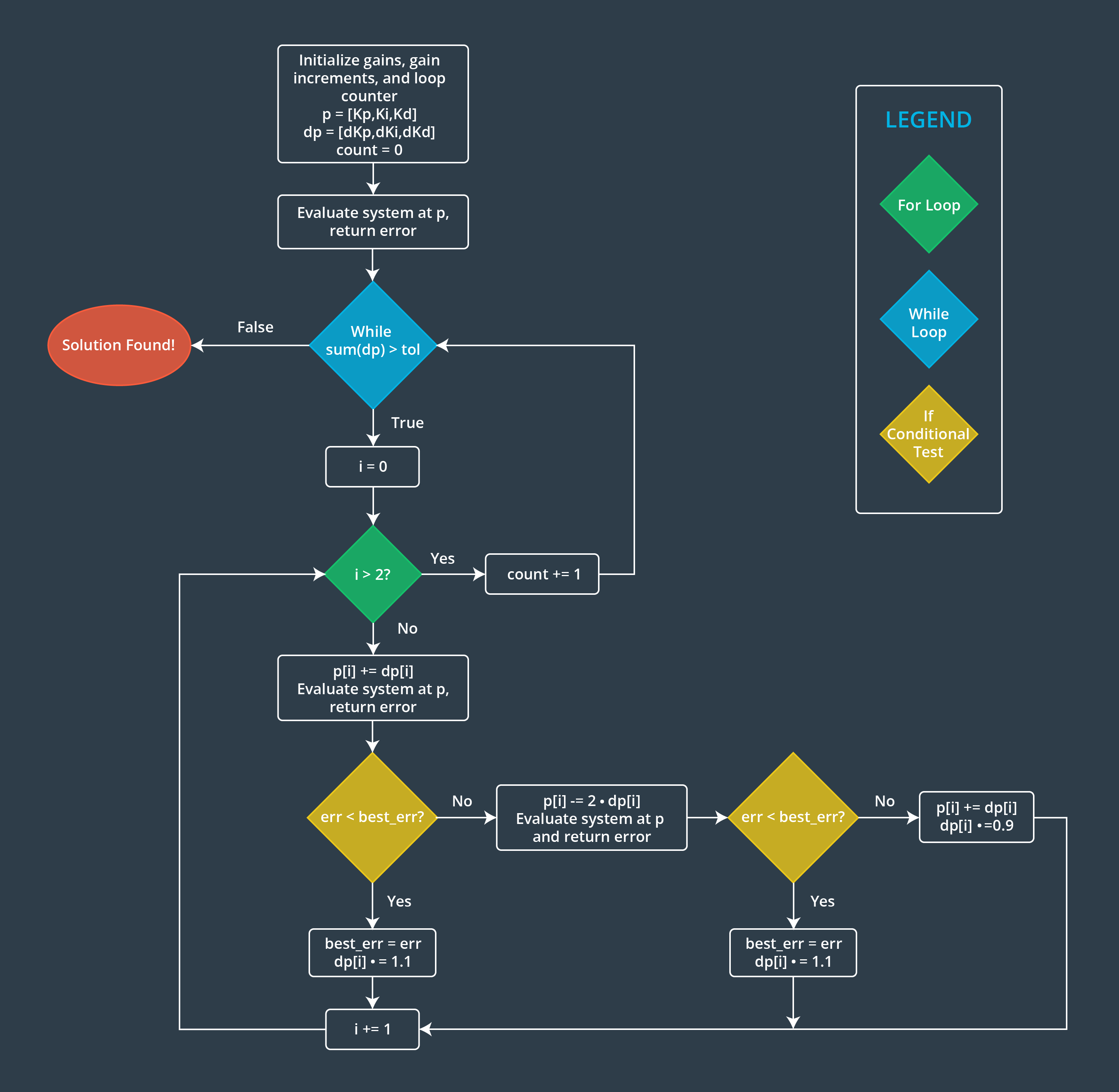
我们可以把以下过程称之为 Twiddle(旋弄、捻弄),可以帮助我们确定合适的P、I、D三个值,其原理是构建一个初始化为 [0, 0, 0] 的参数列表,然后循环多次,根据每次循环返回的误差均值,调大或调小参数(调整的步伐参数由另一个3个值的列表控制)。直到步伐参数之和小于一定阈值时,停止循环,把此时参数列表作为最终的PID参数。
代码实现:
- 拷贝依赖文件 robot.py 到项目目录
- 新建文件
pid_twiddle.py并编写如下内容:
from robot import Robot, show
import numpy as np
def make_robot():
"""
创建并初始化机器人小车, 设置初始位置为(0, -1), 初始旋转角度为0
"""
robot = Robot()
robot.set(0, -1, 0)
robot.set_steering_drift(10 / 180 * np.pi)
return robot
# NOTE: We use params instead of k_p, k_d, k_i
def run(robot, params, n=100, speed=1.0):
x_trajectory = []
y_trajectory = []
err = 0
prev_cte = 0 - robot.y
int_cte = 0
for i in range(2 * n):
cte = 0 - robot.y
diff_cte = cte - prev_cte
int_cte += cte
prev_cte = cte
steer = params[0] * cte + params[1] * diff_cte + params[2] * int_cte
robot.move(steer, speed)
x_trajectory.append(robot.x)
y_trajectory.append(robot.y)
if i >= n:
err += cte ** 2
return x_trajectory, y_trajectory, err / n
# Make this tolerance bigger if you are timing out!
def twiddle(tol=0.2):
p = [0, 0, 0]
dp = [1, 1, 1]
robot = make_robot()
x_trajectory, y_trajectory, best_err = run(robot, p)
it = 0
while sum(dp) > tol:
# 循环,直到系数之和小于等于阈值(默认阈值为0.2,起始值为3.0)
print("Iteration {}, best error = {}".format(it, best_err))
for i in range(len(p)):
p[i] += dp[i]
robot.reset()
x_trajectory, y_trajectory, err = run(robot, p)
if err < best_err:
best_err = err
dp[i] *= 1.1 # 此值有助于减少总误差,下次可以多加点
else:
p[i] -= 2 * dp[i]# 此值不利于于减少总误差,直接把刚加的去掉,并且向反方向减一倍
robot.reset()
x_trajectory, y_trajectory, err = run(robot, p)
if err < best_err:
best_err = err
dp[i] *= 1.1 # 如果反方向有利于减少总误差,扩大此值
else:
p[i] += dp[i] # 恢复为原值
dp[i] *= 0.9 # 把缩小变化系数
it += 1
return p, best_err
params, err = twiddle()
print("Final twiddle error = {} params = {}".format(err, params))
robot = make_robot()
x_trajectory, y_trajectory, err = run(robot, params)
show(x_trajectory, y_trajectory, label="Twiddle PID")
运行结果:
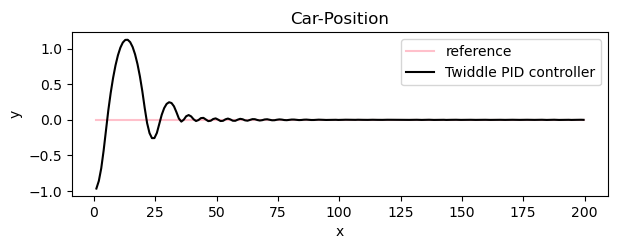
可以与之前使用的PID进行对比,明显可以看出当前PID在x=50附近就开始在目标轨迹附近稳定下来。而之前的要到x=100的位置才可以稳定下来。
输出日志:
根据最后的输出日志可知:
最小的误差均值为 7.940560962605189e-07
此时对应的P、D、I分别为: 10.716018504541431, 18.68325573584582, 0.020275559590445292
Iteration 0, best error = 7972.071547906822
Iteration 1, best error = 0.048853806107299856
Iteration 2, best error = 0.03026214567061226
Iteration 3, best error = 0.0077046028132098255
Iteration 4, best error = 0.003222969736312333
Iteration 5, best error = 0.0016693580238629137
Iteration 6, best error = 0.0009763548793623677
Iteration 7, best error = 0.0006143945322198215
Iteration 8, best error = 0.0006143945322198215
Iteration 9, best error = 0.0006143945322198215
Iteration 10, best error = 0.0006143945322198215
Iteration 11, best error = 0.0006143945322198215
Iteration 12, best error = 0.0006143945322198215
Iteration 13, best error = 0.0006143945322198215
Iteration 14, best error = 0.0006143945322198215
Iteration 15, best error = 0.0006143945322198215
Iteration 16, best error = 0.0006143945322198215
Iteration 17, best error = 0.0006143945322198215
Iteration 18, best error = 0.000612580641120018
Iteration 19, best error = 0.0005393890590252054
Iteration 20, best error = 0.0004707073557690764
Iteration 21, best error = 0.00040854195467355256
Iteration 22, best error = 0.00036173191894990056
Iteration 23, best error = 0.0003496794660242756
Iteration 24, best error = 0.00030372592629584626
Iteration 25, best error = 0.00026649497706284647
Iteration 26, best error = 0.00026502850791677363
Iteration 27, best error = 0.00023267758106029443
Iteration 28, best error = 0.00023267758106029443
Iteration 29, best error = 0.00023267758106029443
Iteration 30, best error = 0.00023267758106029443
Iteration 31, best error = 0.00023267758106029443
Iteration 32, best error = 0.00023222333181571606
Iteration 33, best error = 0.00023222333181571606
Iteration 34, best error = 0.00023222333181571606
Iteration 35, best error = 0.00023222333181571606
Iteration 36, best error = 0.00023222333181571606
Iteration 37, best error = 0.00022978905387007294
Iteration 38, best error = 0.00019428921416175855
Iteration 39, best error = 0.00014919774411248834
Iteration 40, best error = 2.2810673236127803e-05
Iteration 41, best error = 6.65198948619874e-06
Iteration 42, best error = 8.957452817602662e-07
Iteration 43, best error = 8.957452817602662e-07
Iteration 44, best error = 8.957452817602662e-07
Iteration 45, best error = 8.957452817602662e-07
Iteration 46, best error = 8.957452817602662e-07
Iteration 47, best error = 8.957452817602662e-07
Iteration 48, best error = 8.957452817602662e-07
Iteration 49, best error = 8.957452817602662e-07
Iteration 50, best error = 8.957452817602662e-07
Iteration 51, best error = 7.940560962605189e-07
Iteration 52, best error = 7.940560962605189e-07
Iteration 53, best error = 7.940560962605189e-07
Iteration 54, best error = 7.940560962605189e-07
Iteration 55, best error = 7.940560962605189e-07
Iteration 56, best error = 7.940560962605189e-07
Iteration 57, best error = 7.940560962605189e-07
Final twiddle error = 7.940560962605189e-07 params = [10.716018504541431, 18.68325573584582, 0.020275559590445292]