相机透镜&畸变¶
透镜¶
实际成像时,如果小孔过小,则入射光的强度会受到影响,进一步会影响到成像。 另一方面,由于光的波动性,在小孔的边缘上,光将发生衍射,因此,这些光将在像平面上“散播”。当小孔变的越来越小时,入射光的“散播”范围将变得越来越大,因此,入射光中越来越多的能量将会被“散播”到:偏离入射光方向的“地方”。

我们在使用针孔相机时,我们做过一个假设:针孔是无线小的一个孔。在真实物理世界中,我们的假设一般无法成立,那如果改变针孔的大小后,会发生怎样的变化呢?

如上图所示,当针孔尺寸发生改变后,穿过针孔的光线数量就会增加。光线数越多,像平面中的点就会被三维世界中物体上越多的点影响,导致图像越发模糊。针孔小了,得到的图像更清晰,但也更暗。自然而然的,我们就会想到针孔模型下的一个基本问题:我们能设计一个相机能得到既清晰又明亮的图像吗?
为了解决小孔相机的上述问题,我们现在考虑:在成像系统中使用透镜。镜头可以使光线聚焦或分散,如果我们选用一个理想的透镜替代针孔,那他应该具有以下特性:P点发出的所有射线,经镜头折射后,聚焦在像平面上P'点。

假如我们另取一点 Q ,在像平面上的投影点则可能是模糊或失焦的。每个镜头都会有特定的准确对焦的距离,在摄影学或计算机图形学中也叫景深(depth of field)。

镜头能够讲所有平行于光轴的光线折射到同一个点,称之为焦点。焦点和光心的距离即为焦距f。从光心穿过的光线不会偏离原始方向。
一个理想的透镜具有如下两个性质:
- 它的投影方式和小孔模型相同
- 将一定数量的光线汇聚在一起。
畸变参数¶
相机的内参除了以上f_x,f_y,u_0,v_0,还包含畸变系数[k_1,k_2,p_1,p_2,k_3]
理想的透镜是没有畸变的。但是,因为制造和安装精度等方面的原因,镜头总是存在这畸变。畸变是相机固有特性,同款相机的畸变也会有些许差异,但是其和相机内参一样,标定一次即可。
畸变参数分为径向畸变(Radial Distortion)和切向畸变(Tangential Distortion),除了这两种之外也还有其他类型畸变,但是没有这两种显著,故忽略不计。
径向畸变¶
径向畸变来自透镜形状不规则以及建模的方式,导致镜头不同部分焦距不同。光线在远离透镜中心的地方偏折更大(枕型畸变)或更小(桶形畸变)。
从径向畸变开始。实际摄像机的透镜总是在成像仪的边缘产生显著的畸变,如下图所示。对某些透镜,光线在远离透镜中心的地方比靠近中心的地方更加弯曲。

对径向畸变,成像仪中心(光轴)的畸变为0,随着向边缘移动,畸变越来越严重。当然,在实际的相机中,这种畸变比较小,而且可以用r=0位置周围的泰勒级数展开的前几项来定量描述。
x_{corrected}=x\left( 1+k_{1}r^{2}+k_{2}r^{4}+k_{3}r^{6}\right)
y_{corrected}=y\left( 1+k_{1}r^{2}+k_{2}r^{4}+k_{3}r^{6}\right)
(r^2 = x^2 + y^2)
下图显示矩形网格因径向畸变而产生的位移。越远离光轴中心的地方,矩形网格上的点偏移越大。

下图描述了3种常见的畸变情形,桶形畸变通常k1>0,枕形畸变通常k1<0。

切向畸变¶
切向畸变来自于整个摄像机的组装过程。由于透镜制造上的缺陷使得透镜本身与图像平面不平行而产生的,如下图所示:
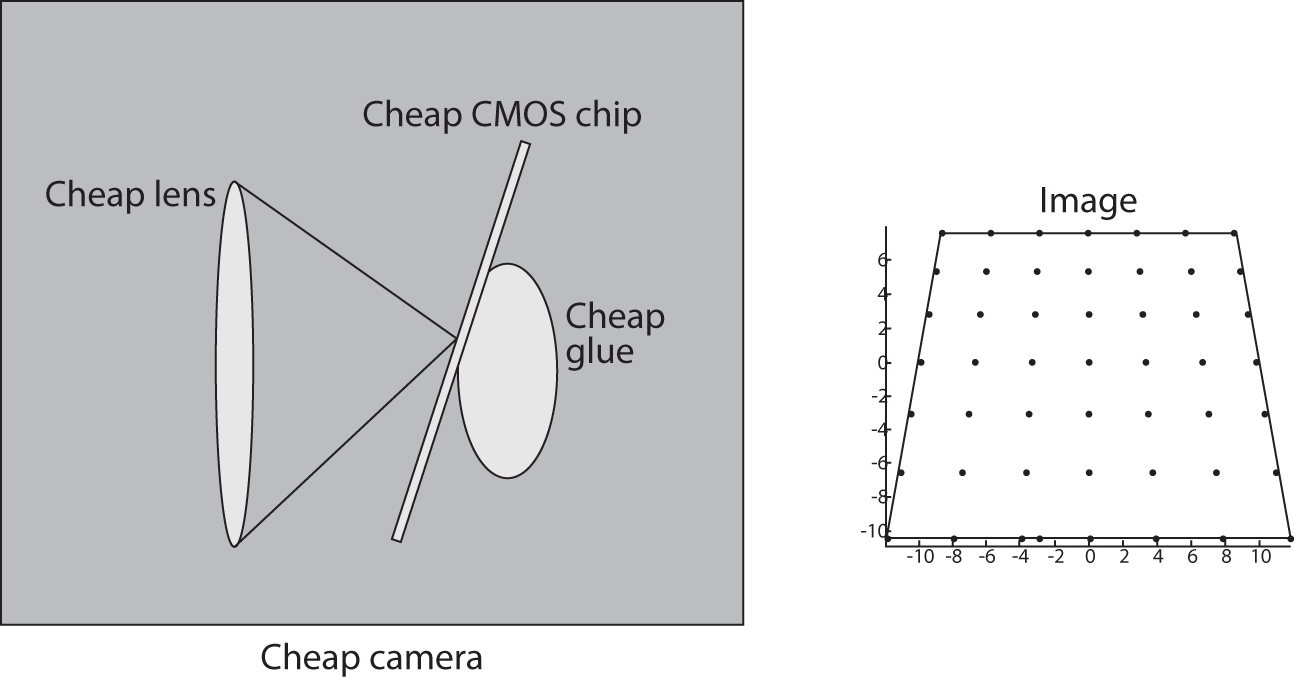
切向畸变可以用两个额外的参数p_1和p_2来描述: